MECCATRONICA
applicazioni
Automazione e Strumentazione
■
Giugno 2014
61
Controllo del motore a induzione
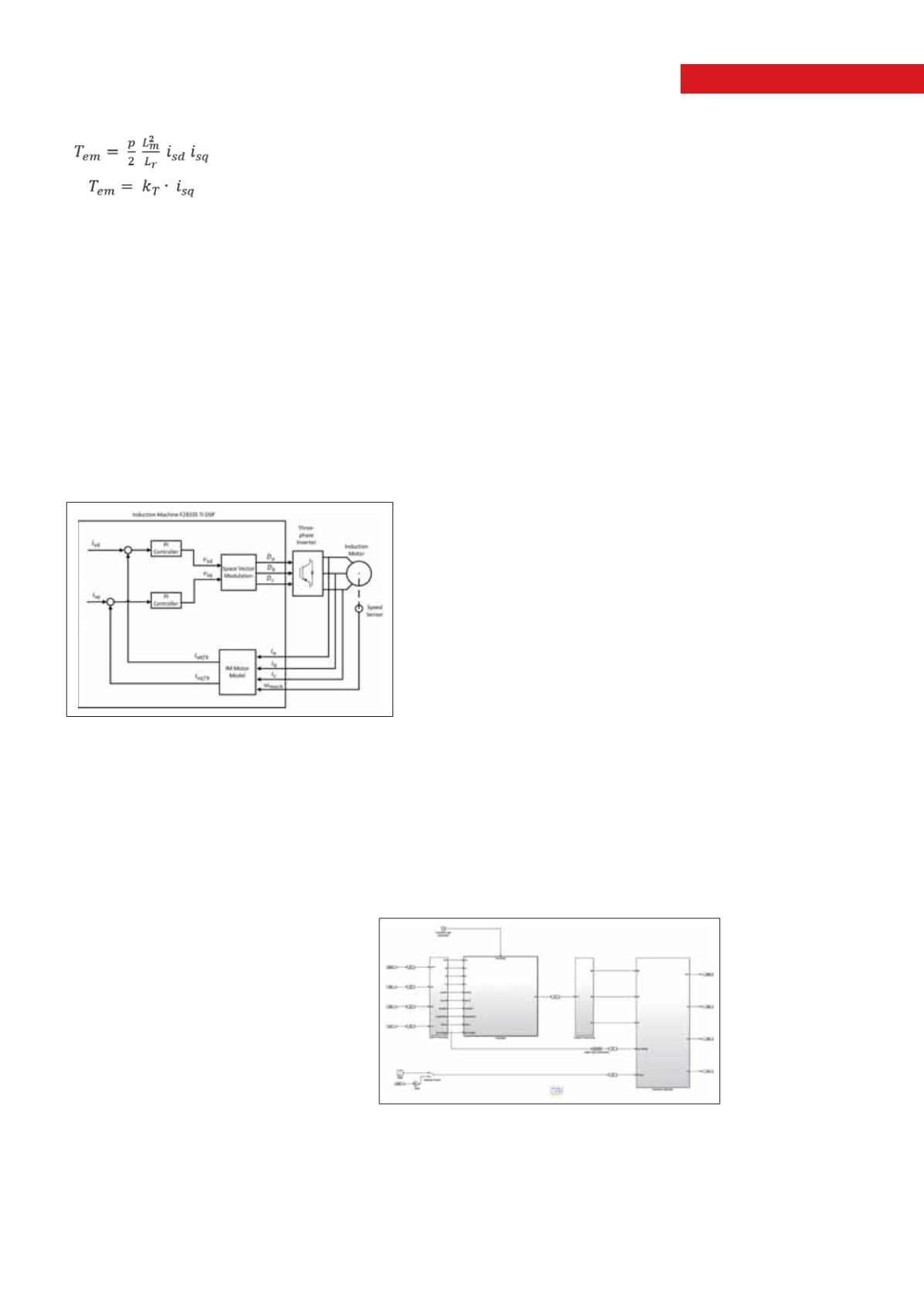
In base alle equazioni dell’IM, sappiamo che se
controllassimo in modo indipendente la corrente
che produce il flusso
i
sd
e la corrente che produce
la coppia
i
sq
otterremmo la coppia elettromagne-
tica (
υ
figura 2
). Possiamo fare dei compro-
messi quando selezioniamo componenti di gene-
razione di coppia o flusso ideali. Per esempio, in
caso di carichi leggeri potrebbe essere auspicabile
ridurre la corrente che produce il flusso, in modo
da ridurre le perdite del sistema, oppure control-
lare le due correnti per ottenere l’amperaggio
coppia-per-motore di picco.
Utilizzeremo la macchina al suo flusso nomi-
nale finché non si verifica un indebolimento del
campo. Una volta raggiunta la velocità nominale
per l’indebolimento del campo, ridurremo la cor-
rente
i
sd
come funzione inversa della velocità del
rotore.
Per controllare il motore, dobbiamo trasfor-
mare le correnti di feedback dello statore nei
loro equivalenti DC sincroni usando la velocità
meccanica e le trasformate di Clarke e Park. La
regolazione delle correnti dello statore richiede
l’uso di un modello di motore a induzione per
stimare il flusso del motore. Usando un controllo
proporzionale-integrale (PI), trasformiamo le due
correnti nelle tensioni DQ dello statore
v
sd
e
v
sq
.
Usiamo poi
v
sd
e
v
sq
per calcolare i comandi duty
cycle che alimentano l’inverter trifase usando una
tecnica di modulazione vettoriale spaziale.
Costruzione e implementazione
del sistema
Per la costruzione e l’implementazione del
sistema costituito dall’IM comandato ad anello
chiuso e dal dinamometro DC si è seguita una
procedura precisa. La procedura per implemen-
tare il sistema dinamometrico è la seguente: (1)
estrarre i parametri dell’IM utilizzando l’analisi a
elementi finiti (FEA); (2) simulare un modello di
sistema ad anello chiuso costituito dal controllore
dell’IM e dall’impianto; (3) generare il codice
per il deployment dei controllori IM e DC su TI
F28335; (4) controllare, calibrare e monitorare il
sistema con un CANalyzer di Vector.
Definizione dei parametri del motore
La prima fase della configurazione del dinamo-
metro è spesso la più complessa. Questa fase
prevede il calcolo o la misurazione dei seguenti
parametri interni del motore: induttanza magne-
tizzante
L
m
, induttanza combinata dalla perdita e
magnetizzazione dello statore
L
s
, induttanza com-
binata dalla perdita e magnetizzazione del rotore
L
r
, resistenza del rotore
R
r
, resistenza dello
statore
R
s
, velocità meccanica nominale, ten-
sione nominale e velocità di slip nominale.
Esistono due approcci ampiamente diffusi
per determinare questi parametri: calcolo
partendo da un modello di analisi a elementi
finiti (FEA), oppure esecuzione di una misu-
razione fisica attraverso test con carico e
senza carico. Utilizzeremo l’approccio FEA,
che ci consente di ottenere le tensioni, le
correnti e i flussi nominali di rotore e sta-
tore scomposti sull’asse diretto e sull’asse di
quadratura. Una volta stabilita la relazione
tra flusso e corrente, possiamo usare le equa-
zioni per calcolare la corrente nominale del
rotore sull’asse
d
.
Una volta definiti i parametri del motore, li
con-
vertiamo in data object di Simulink
. Possiamo
poi specificare il valore numerico, i range, i tipi
di dati e altri attributi importanti, nonché regolare
i guadagni del modello senza manipolare i file.
Creazione del modello di sistema
La fase successiva prevede la creazione di un
controller per IM ad anello chiuso e del sistema
di test, usando la topologia descritta nella sezione
“Controllo del motore a induzione”. Questa fase
Figura 2 - Diagramma di alto livello del controllo su coppia e flusso
del motore a induzione (IM)
Figura 3 - Modello del
controllore ad anello
chiuso dell’IM


