MECCATRONICA
applicazioni
Automazione e Strumentazione
■
Giugno 2014
59
L’ AUTORE
K. Grand, Principal Consulting
Engineer di MathWorks
Utilizzando il Support Package per Texas Instruments C2000 di MathWorks e
una procedura di Model-Based Design, è stato sviluppato un dinamometro per
il test di motori elettrici, con sistema di controllo in anello chiuso. I software di
Mathworks, MatLab e Simulink, sono stati utilizzati per lo studio delle equazioni
fisiche che governano il sistema e lungo tutto il flusso di lavoro: sviluppo e
simulazione del modello, trasformazione della legge di controllo in codice target
embedded, test del software del controllore del motore in modalità velocità o
coppia, e infine deployment del codice su un sistema di prova dinamometrico.
Creare un dinamometro da laboratorio
per motori elettrici
MODEL-BASED DESIGN PER REALIZZARE UN SISTEMA DI TEST
Kerry Grand
Con i motori elettrici che consumano quasi il
50% dell’energia elettrica mondiale, sempre più
aziende e università ricercano e sviluppano solu-
zioni per il risparmio energetico come gli
aziona-
menti a frequenza variabile
(VFD).
Un VFD regola la velocità e la coppia del motore
facendo variare la frequenza in ingresso, le ten-
sioni e le correnti del motore. Generalmente, un
VFD è costituito da un controllore embedded, da
un inverter per trasformare la tensione DC in ten-
sione AC trifase e da un motore trifase. Il motore
è tipicamente un
motore sincrono a magneti per-
manenti
(PMSM) o
un motore a induzione
(IM).
Sia per la ricerca che per lo sviluppo di leggi di
controllo, i sistemi VFD devono essere testati su
un dinamometro. Un dinamometro che funzioni
con alimentazione estesa è una soluzione costosa.
Si cerca quindi di usare un sistema dinamome-
trico a costo ridotto che sia capace di funzionare
a tensioni di bus DC inferiori, usando una fonte
di alimentazione con corrente limitata, riducendo
i problemi di sicurezza e i rischi di dan-
neggiare il sistema.
Questo articolo descrive un flusso di
lavoro che utilizza il
Model-Based
Design
con
MatLab
e
Simulink
per
sviluppare un dinamometro desktop o
da laboratorio. Inizieremo descrivendo
la configurazione hardware e software
usata per creare questo sistema ad
anello chiuso, le equazioni fisiche che
governano il motore sincrono e i prin-
cipi di controllo sottostanti. Descrive-
remo poi le fasi principali del flusso
di lavoro: sviluppo e simulazione del modello,
trasformazione della legge di controllo in codice
target embedded, test del software del controllore
del motore in modalità velocità o coppia, e infine
deployment del codice su un sistema di prova
dinamometrico.
Requisiti di progettazione
e componenti del sistema
L’obiettivo fondamentale del nostro sistema
dinamometrico è quello di fornire un ambiente di
test sicuro e a basso costo. I requisiti includono:
capacità di fornire un’alimentazione DC a bassa
tensione (42 V o meno) per l’inverter, in modo
da ridurre il potenziale energetico del bus DC e i
rischi di shock elettrico; alloggiamento e impianti
meccanici sicuri per i motori IM e DC, per pro-
teggere l’operatore in caso di guasti dei collega-
menti meccanici, comandi di coppia involontari
o altri guasti al sistema; funzioni di controllo e
calibrazione da remoto.
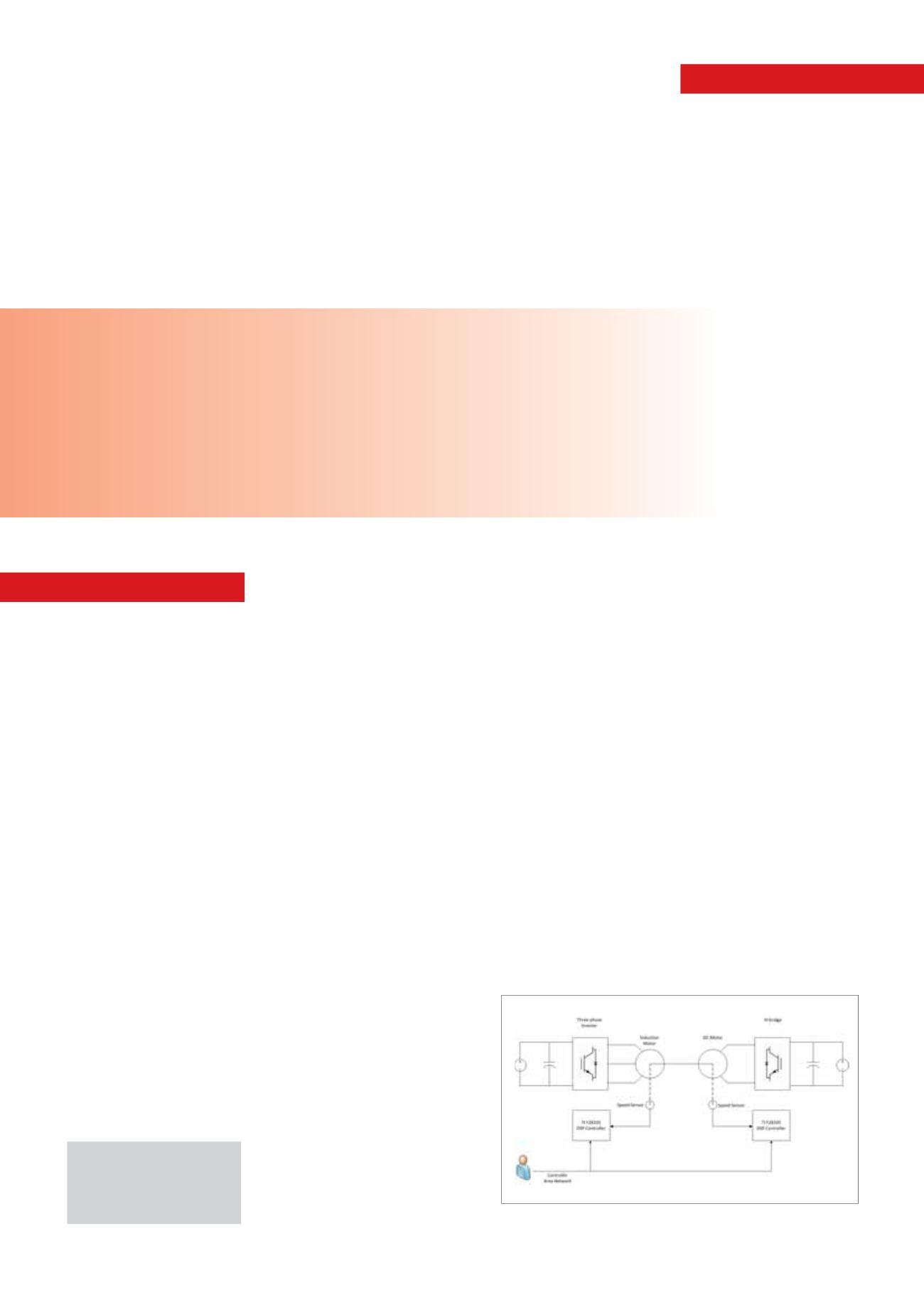
Figura 1 - Architettura di alto livello del sistema dinamometrico IM/DC.


