MECCATRONICA
applicazioni
62
è illustrata nella
υ
figura 3
. Si noti che
la legge
di controllo principale è una libreria Simu-
link riutilizzabile
, che semplifica la transizione
da un modello di sistema ad anello chiuso verso
un modello target di controllore embedded. Rac-
comandiamo di astrarre il modello di controllore
principale dai suoi input e output, in modo che la
legge di controllo interna resti invariata quando si
passa dal modello del sistema al modello del con-
trollore. Analizziamo le prestazioni del sistema
utilizzando il
logging dei segnali di Simulink
e uno
script di MatLab
, poiché la simulazione
fino alla frequenza di commutazione pro-
duce una considerevole serie di dati.
Interfacciamento dei modelli di IM
e di controllore DC con l’hardware
Una volta completati i modelli di simu-
lazione a livello di sistema dell’IM e del
controllore DC, incorporiamo i modelli in
un framework per la generazione di codice
di produzione. Ciò significa sostituire i
layer di elaborazione di input e output con
blocchi target F28335 fisici. Interfacciamo
sia l’IM che i controllori DC con la misu-
razione della corrente esterna (il blocco
ADC), con la misurazione della tensione DC (il
blocco ADC), con la misurazione della velocità
(il blocco eQEP) e con l’output PWM (il blocco
ePWM).
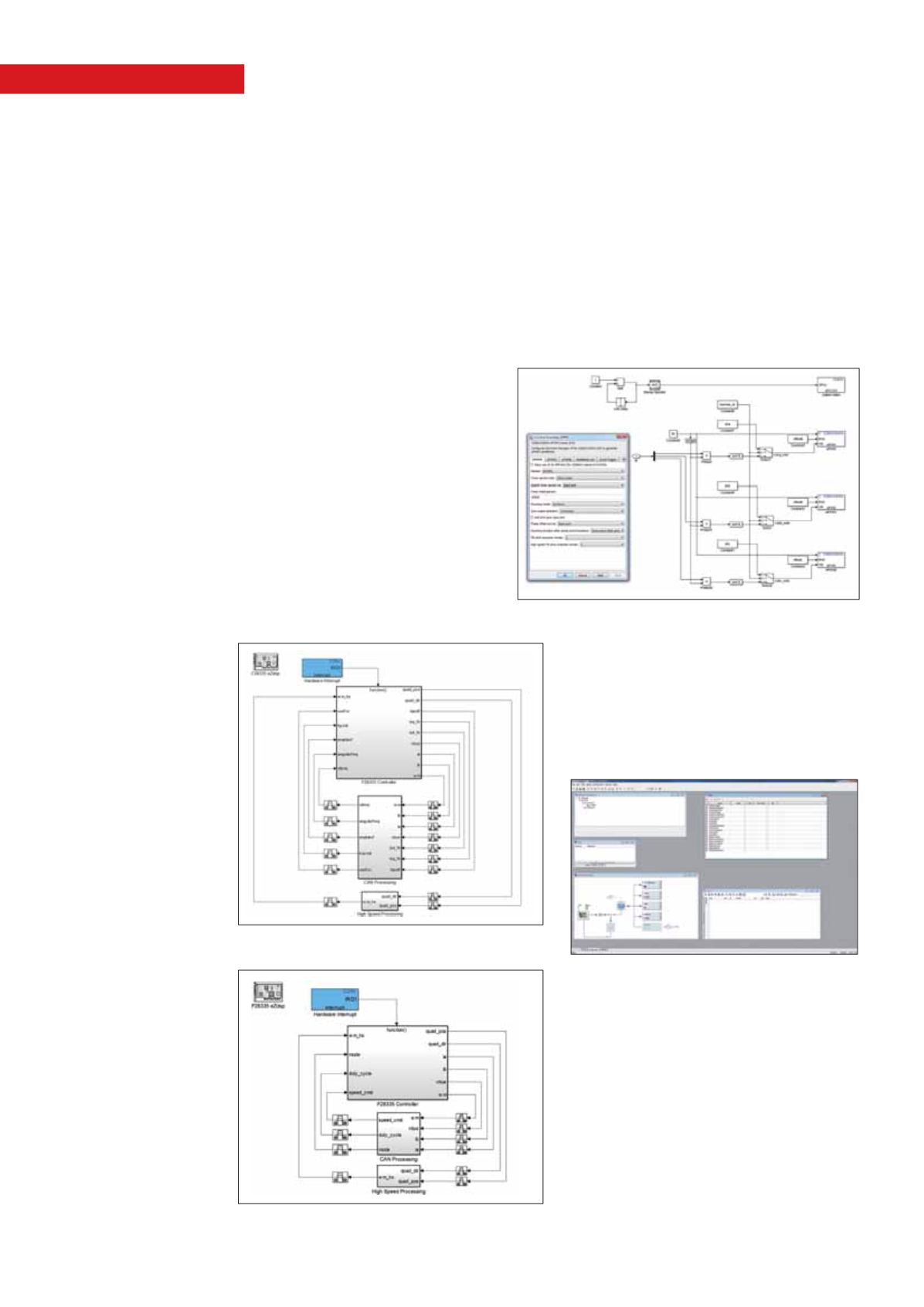
Sia l’IM che i controllori DC funzionano a una
frequenza di 10 kHz sincronizzata con il periodo
PWM e la fine della conversione ADC (
υ
figura
4
e
υ
figura 5
). Gli output ePWM devono essere
allineati usando la selezione dell’output Sync (
υ
figura 6
). Entrambi i modelli sono ora pronti per
la generazione di codice di produzione mediante
Embedded Coder.
Descrizione della configurazione
e del controllo finali
Usiamo il CANalyzer di Vector per acquisire
i dati di controllo del sistema dinamometrico
sia per il motore IM che per il motore DC
(
υ
figura 7
).
Il controllo del motore DC è costituito da due
modalità di funzionamento: controllo di velocità
e controllo duty cycle. Il controllo duty cycle ci
consente di testare e integrare in modo controllato
la modulazione dell’ampiezza dell’impulso per il
motore DC. Dopo l’integrazione del DC Motor
System, il motore DC funzionerà nella sola moda-
lità velocità, consentendo all’IM di funzionare in
modalità coppia. Il monitoraggio del motore DC
e dell’inverter è costituito dalle correnti di fase
i
a
e
i
b
, dalla velocità del rotore
t
mech
e dalla tensione
Figura 4 - Modello di deployment del controllore IM
Figura 5 - Modello di deployment del controllore DC
Figura 6 - Allineamento dei segnali PWM
Figura 7 - Controllo e acquisizione dati con CANalyzer
Vector
Giugno 2014
■
Automazione e Strumentazione


