

















 78 / 100
78 / 100

CONTROLLO
tecnica
78
Ottobre 2017
Automazione e Strumentazione
PCU
(Plant-Check Up) è stato sviluppato nel Laboratorio di
Controllo dei Processi Chimici dell’Università di Pisa
[1]
ed
è in grado di diagnosticare le principali cause di malfunziona-
mento dei loop di regolazione di base, indicando le azioni da
intraprendere. Le principali cause possono essere ricondotte a
presenza di disturbi esterni, tuning scadente dei regolatori, mal-
funzionamento di valvole e sensori, interazioni da altri loop.
Queste si manifestano come oscillazioni nelle variabili control-
late e quindi la loro individuazione per effettuare l’intervento
più appropriato è di fondamentale importanza (nei quattro casi:
intervento a monte, retuning dei regolatori, manutenzione stru-
menti, passaggio a schemi multivariabili).
La disponibilità di variabili diverse permette di distinguere tra
una
versione base
(PCU) e una
versione avanzata
(PCU+) con
prestazioni nettamente superiori. Le diverse variabili disponibili
sono schematizzate nella
υ
figura 1
.
La versione base del sistema fa riferimento ai dati resi dispo-
nibili da impianti di vecchia progettazione, di fatto tre varia-
bili:
Set Point
(SP),
Variabile Controllata
(PV) e
Uscita
dal Regolatore
(OP) ed è installata in impianti di raffineria
(Eni). La versione più avanzata fa riferimento a ulteriori dati
resi disponibili attraverso sistemi di comunicazione a Bus di
Campo da dispositivi intelligenti, come
posizione della val-
vola
(MV),
pressione e segnale al posizionatore
(P, DS),
oltre a parametri di sicurezza e integrità di strumenti e attua-
tori. Questa versione installata in impianti di potenza (Enel)
e resa disponibili per gli utenti
Clui AS
(Club Utilizzatori
Industriali di Automazione e Strumentazione), permette una
diagnostica più raffinata.
In effetti la presenza di attrito nella valvola è una delle più
frequenti cause di malfunzionamento. In assenza di variabili
interne alla valvola, l’attrito deve essere diagnosticato dal con-
fronto della PV e della OP: tecniche aventi questa finalità sono
state oggetto di intensa attività di ricerca negli ultimi anni
[2,
3, 4, 5]
. Il sistema PCU applica tecniche diverse sui dati acqui-
siti, in modo da poter esprimere un verdetto nei casi in cui c’è
una certezza assoluta al fine di evitare falsi allarmi. Il fenomeno
dell’attrito è comunque un fenomeno relativamente lento e la
sua evoluzione può essere seguita con acquisizioni successive.
La quantificazione dell’attrito è anche un aspetto di grande
importanza per valutare la rilevanza del fenomeno ed è oggetto
di attività di ricerca attuale
[6, 7]
.
L’altra importante causa di malfunzionamento e richiesta di inter-
vento sui loop di base riguarda il tuning dei regolatori; il sistema
permette di trattare loop a SP costante e variabile e tenere conto
della tipologia del loop (livello, portata, pressione, temperatura)
nella definizione dei valori di soglia degli indici di prestazione.
La calibrazione di questi indici è certamente una delle fasi nella
quale l’esperienza e le competenze degli operatori giocano un
ruolo fondamentale.
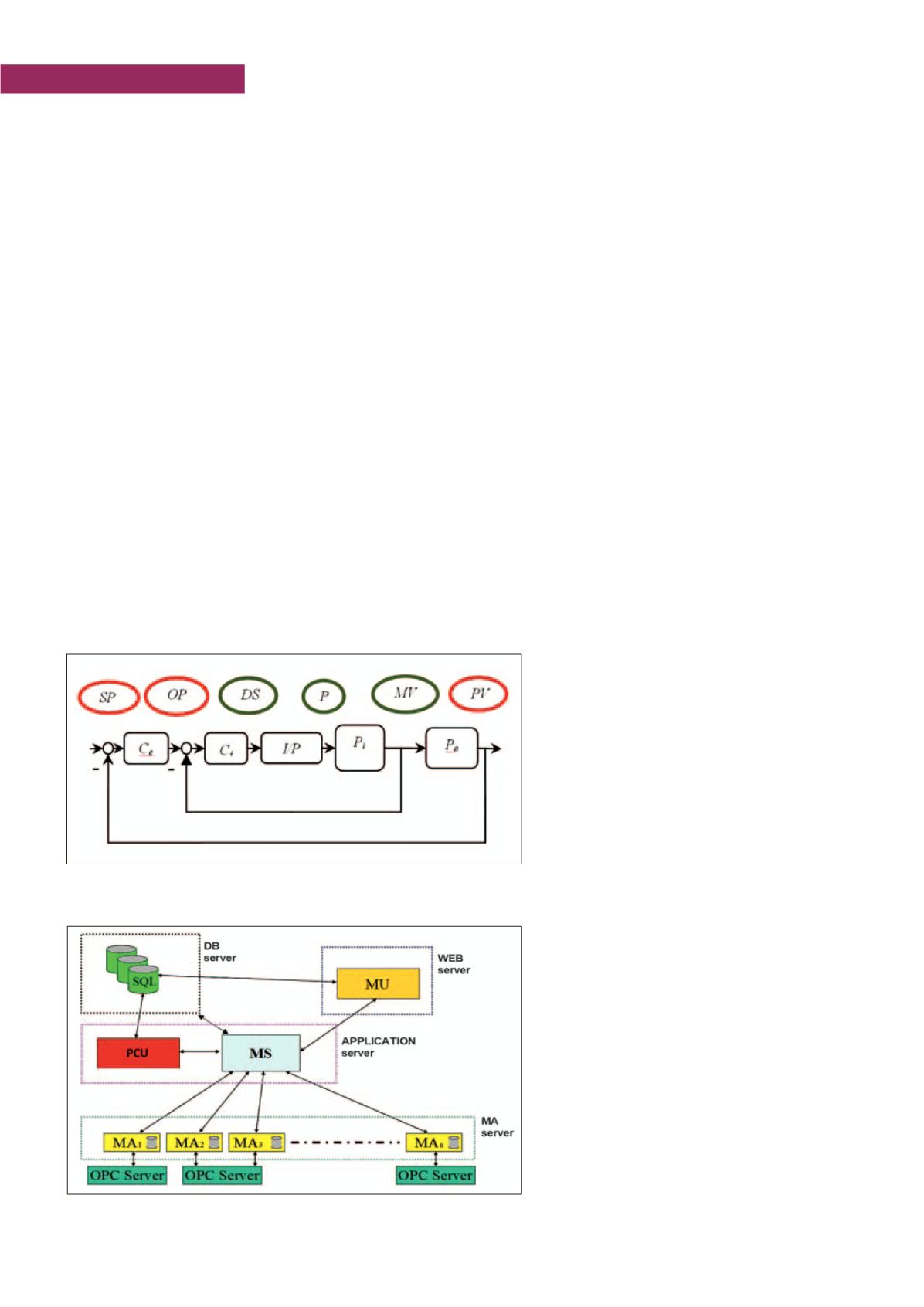
L’architettura del sistema di monitoraggio è costitu-
ita da una serie di
Moduli
tra loro interagenti (cfr.
υ
figura 2
); tra questi:
Modulo Utente
(MU: confi-
gura i loop, verifica lo stato di avanzamento, interroga
il data base per visualizzazione e report);
Modulo di
Scheduling
(MS: stabilisce la gerarchia, l’ordine e la
frequenza di acquisizione);
Archivio
(DB: conserva
parametri e dati acquisiti dal DCS attraverso i Moduli
di Acquisizione MAi e i verdetti emessi dalla PCU). Il
sistema PCU è il motore della struttura ed opera fuori
linea in maniera sequenziale sui dati dei loop da DB.
Nella
υ
figura 3
è riportata l’immagine globale di
tutti i loop monitorati sull’impianto con indicazioni
del loro status. Con click sul singolo impianto e sin-
goli loop è possibile visualizzare l’andamento delle
variabili di interesse (attuale e storico); un esempio
di loop con attrito è riportato nella
υ
figura 4
.
3. Il sistema di monitoraggio
avanzato (PCU+)
La disponibilità di misure di variabili addizionali pos-
sibile attraverso strumentazione intelligente (posizio-
natori di nuova generazione e trasmissione di segnali
mediante bus di Campo) ha portato alla
versione
avanzata
(PCU+). In questa è possibile una valuta-
zione più immediata dello stato della valvola, con una
individuazione di cause specifiche di malfunziona-
mento (attrito, perdita di aria, sporcamento e occlu-
sione dell’ugello), distinguendo cause meccaniche da
cause di tipo elettrico o altro
[8]
.
Figura 1- Variabili disponibili in un loop di regolazione
Figura 2 - Architettura del sistema