

















 74 / 100
74 / 100

CONTROLLO
tecnica
74
Ottobre 2017
Automazione e Strumentazione
nale alla velocità stessa secondo un coefficiente di attrito µ (in kg/
sec). Pertanto, sulla base dell’equazione fondamentale della dina-
mica (forza = massa × accelerazione) e indicando con
v(t)
la velocità
(in funzione del tempo) e con
v’
la sua derivata (rispetto al tempo), si
può scrivere l’equazione
mv’=mg-μv.
Si tratta dunque di una equa-
zione differenziale lineare di primo grado che come tale è risolta da
una funzione di tipo esponenziale. In questo caso, se la massa parte
da ferma, la soluzione è
v(t)=(mg/μ)(1-e
-μt/m
)
. Ciò significa che la
velocità aumenta in modo esponenziale fino al valore
mg/μ
e lo fa
tanto più velocemente quanto più il rapporto µ/m risulta elevato. Se
ne deduce allora che la velocità del grave in caduta libera (non nel
vuoto) non aumenta indefinitamente ma si assesta su di un valore
limite che dipende dalla sua massa e da quanta resistenza la sua
forma gli consente di opporre al moto a causa dell’attrito viscoso con
il fluido che attraversa. La costante (in questo caso pari a µ/m) che
figura come esponente del numero
e
nell’espressione della soluzione
è piuttosto significativa in quanto legata alla rapidità con la quale la
dinamica si esaurisce. Il suo reciproco ha sempre le dimensioni di un
tempo e infatti tipicamente viene detto costante di tempo: più è basso
e più rapidamente il valore di regime verrà raggiunto. Questo valore
è anche il tempo impiegato dalla grandezza per variare del 63.2%
(rispetto a quella che sarà la sua variazione finale). Per
t=m/μ
si ha
infatti
1−e
−1
0,632
per cui al tempo
t=m/μ
la variazione sarà stata
0,632 volte quella complessiva (che vale
mg/μ
).
Modelli di questo tipo, cosiddetti del primo ordine, si trovano dap-
pertutto nella meccanica, nella termodinamica, nella descrizione
del comportamento fisico di molti sistemi reali; si pensi ad esem-
pio all’andamento del livello di un bacino idrico quando piove, alla
dinamica della temperatura di un corpo messo a contatto con una
fonte di calore, alla variazione della tensione elettrica ai capi di un
condensatore in serie con una resistenza. Modelli di ordine supe-
riore occorrono in altri casi (ad esempio per descrivere l’andamento
della posizione di una massa collegata ad una molla); modelli di
più equazioni si rendono necessari per descrivere sistemi di più
variabili tra loro interagenti; modelli non lineari entrano in gioco
quando le relazioni tra le variabili non lo sono. In generale dei
sistemi dinamici, lineari o meno, si può dare una trattazione asso-
lutamente formale e rigorosa, basata su precise definizioni mate-
matiche di equilibrio e di stabilità; introdurre la complessità risulta
opportuno per poter fare previsioni quantitative affidabili che pos-
sono essere determinanti per non intraprendere scelte sbagliate alle
quali poi si è costretti a far fronte attraverso provvedimenti drastici
e costosi. È questo il caso non solo dei sistemi ecologici, sociali ed
economici ma anche del controllo di processo, nel quale la dispo-
nibilità di un buon modello può consentire l’impiego di strategie di
controllo più avanzate, sicure ed efficaci.
Tornando ai limiti, nella
teoria del controllo
ve ne sono di note-
volmente utili e tra i più popolari tutti ricordiamo il teorema del
valore finale secondo cui lo stato stazionario (il valore a regime)
di una variabile fisica
y(t)
può essere ricavato calcolando un limite
del prodotto della funzione di trasferimento in anello chiuso
F(s)
moltiplicata per quella relativa alla perturbazione che ne altera lo
stato (per esempio la variazione del setpoint
r(t)
moltiplicata per
s
, la variabile complessa). Abbandonando il timore di ricorrere a
formule complesse, dovuto alla regola empirica editoriale secondo
cui ad ogni formula si dimezza il numero dei lettori, la tesi del teo-
rema nella sua espressione formale può essere scritta come:
Grazie a questo limite risulta possibile in modo relativamente sem-
plice calcolare il valore di regime delle variabili di processo quando
il sistema viene perturbato da una variazione di una delle variabili di
ingresso: ad esempio nel caso questa sia una variazione del setpoint
a gradino di ampiezza
A
, si ha
R(s)=A/s
per cui il limite da calcolare
risulta essere quello della funzione di trasferimento del processo.
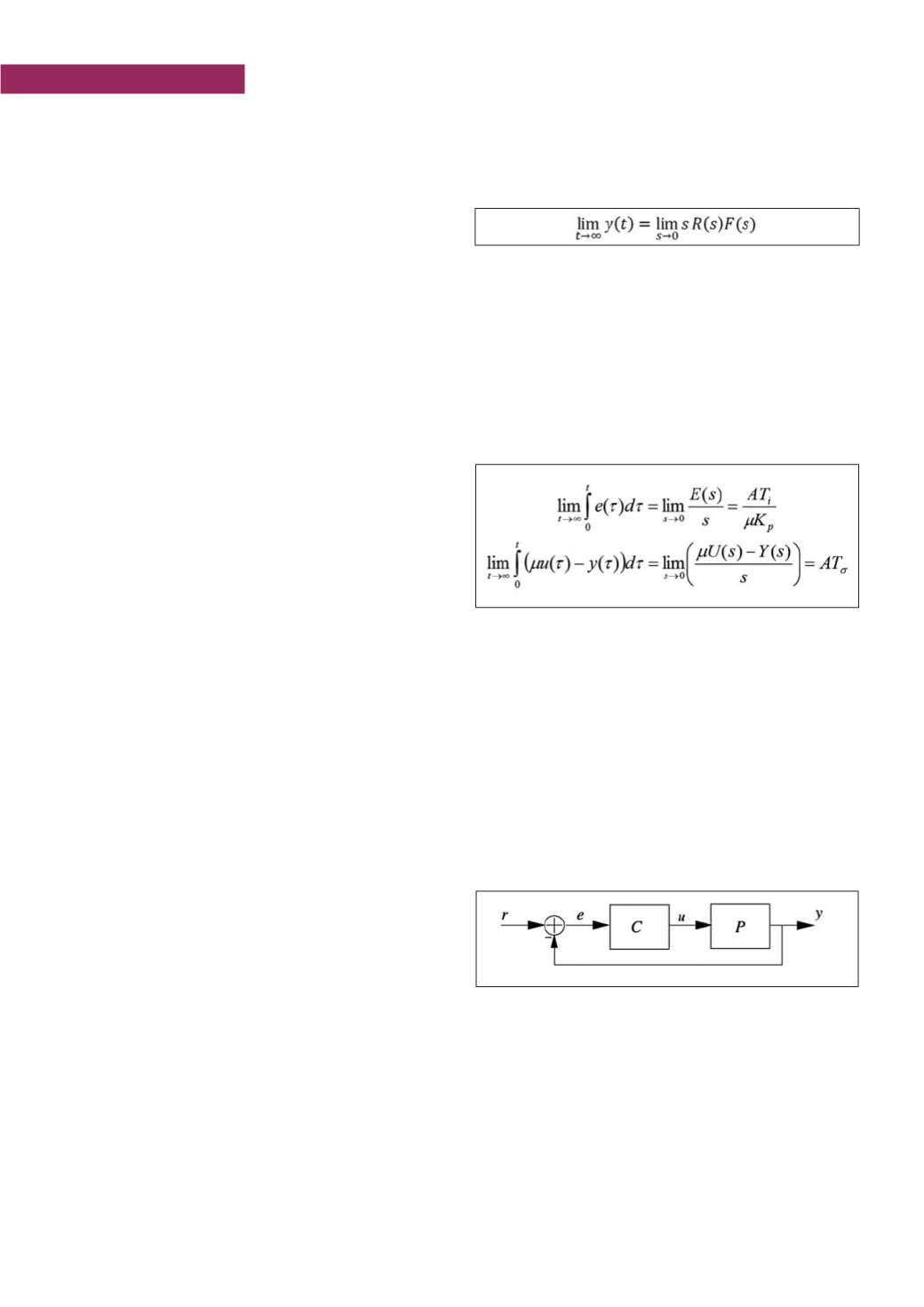
Sfruttando questo teorema si può mostrare come sia possibile cal-
colare alcuni utili parametri della funzione di trasferimento di un
sistema in anello chiuso controllato attraverso un regolatore PID.
Facendo riferimento alla figura 3, risultano infatti:
ove
K
p
e
T
i
sono il guadagno proporzionale e il tempo integrale del
regolatore PID, µ è il guadagno del processo e infine
T
s
è rappre-
sentativo dello sfasamento globale introdotto dal processo (vale
infatti la somma del ritardo puro con la differenza tra la somma
delle costanti di tempo a denominatore e la somma di quelle a
numeratore, con relativo segno, della funzione di trasferimento del
processo). Se il processo può essere sufficientemente bene appros-
simato con un modello del primo ordine più ritardo (FOPDT), si
può immediatamente ricavarne la (unica) costante di tempo sot-
traendo dal valore di
T
s
quello del ritardo puro, valutato come
il tempo necessario alla variabile da controllare per uscire dalla
soglia di rumore. Fatto ciò, si può applicare una delle numerose
formule di taratura disponibili per processi di tipo FOPDT.
Figura 3 - Anello di controllo
Pur di scegliere opportunamente le variabili da considerare, questa tec-
nica può essere applicata anche per processi di tipo integrale, per anelli
in cascata, per schemi con
feedforward
, per controllori di tipo IMC
(Internal Model Control) e per anelli interagenti risultando quindi un
approccio che può essere largamente impiegato nell’industria.
Come disse una volta il celebre ispettore Callaghan (impersonato
da Clint Eastwood in una serie di film degi anni 80) ‘Ogni uomo
dovrebbe conoscere i propri limiti’: questi talvolta non è facile
accettarli ma quelli che possiamo ricavare matematicamente sono
cristallini e spesso anche piuttosto utili.