PROCESSO
tecnica
Automazione e Strumentazione
■
Marzo 2014
69
luppato all’interno del CPCLab dell’Uni-
versità di Pisa, sulla base delle
tre variabili
classiche
(SP, PV, OP) e denominato
PCU
(Plant Check-Up, [10]). Il primo passo di
questo progetto è stato dedicato alla carat-
terizzazione sperimentale delle anomalie
delle valvole ed è stato orientato ad una
diagnosi raffinata basata sulle variabili
aggiuntive rese disponibili dalla strumen-
tazione intelligente. I primi risultati di
questo lavoro sono riportati in
[11]
; gli
sviluppi successivi sono illustrati in
[12]
.
Tale attività, dopo una fase di sperimenta-
zione e di validazione, ha portato allo svi-
luppo di nuova architettura del sistema di
monitoraggio delle prestazioni PCU, sulla
base di quattro o sei misure disponibili.
Il presente articolo è strutturato come se-
gue: la prossima sezione descrive l’im-
pianto sperimentale, la strumentazione ed
i diversi tipi di anomalie riprodotte; la se-
zione seguente illustra brevemente la pro-
cedura di definizione degli indici di presta-
zione, la calibrazione dei valori di soglia
e la logica del si-
stema di diagno-
stica; nella penul-
tima sezione sono
descritti i risultati
ottenuti per alcu-
ni loop industriali;
infine, nell’ultima
sezione sono ri-
portate le conclu-
sioni e gli sviluppi
futuri.
L’impianto sperimentale
Idrolab
è un impianto sperimentale su
scala pilota di proprietà Enel Ingegne-
ria e Ricerca, costruito con l’obiettivo di
testare nuove tecnologie di automazione
per migliorare l’efficienza e la diagnostica
predittiva delle centrali termoelettriche. Il
progetto in questione riguarda lo sviluppo
di una nuova architettura del sistema auto-
matico per il monitoraggio delle presta-
zioni dei loop di regolazione e la diagnosi
dei malfunzionamenti (PCU).
Nell’impianto viene garantito un ricircolo
continuo di acqua tra due serbatoi posti a
quote diverse
[11]
. La presenza di tuba-
zioni di bypass dotate di valvole di regola-
zione e la possibilità di agire su pressione e
livello del serbatoio superiore, permette di
effettuare esperimenti in un’ampia gamma
di condizioni operative. Con il protocollo
di comunicazione
Fieldbus Foundation
,
il sistema di controllo è in grado di rac-
cogliere i dati provenienti dai numerosi
strumenti “intelligenti” installati. Tra gli
altri, sono stati considerati due posiziona-
tori elettro-pneumatici (Fisher Rosemount
- tipo DVC5020F e ABB - tipo TZID). Gli
attuatori sono accoppiati a valvole sferiche
che controllano la portata dell’acqua nelle
tubazioni di ricircolo.
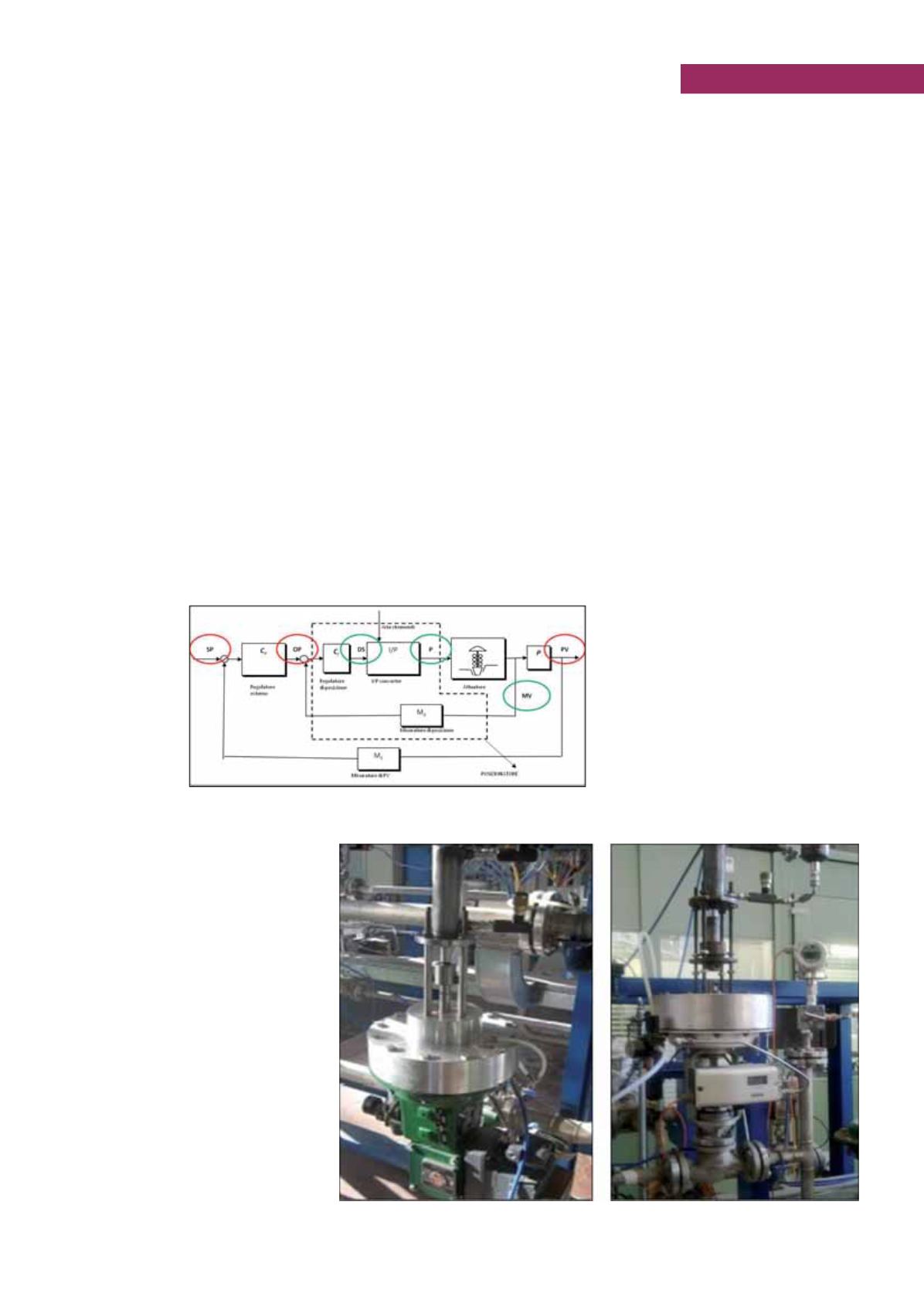
Il posizionatore della valvola agisce come
un loop di controllo interno sulla posizione
della valvola e permette di velocizzarne la
risposta. Una rappresentazione schematica
di un
loop di portata
(FC) con valvola con
posizionatore è riportato nella
υ
figura 1
.
In aggiunta alle misure SP, OP e PV,
disponibili attraverso un
controllore
PID industriale
(Ce), i segnali DS, P ed
MV rappresentano le variabili derivanti
dal posizionatore (per un totale di sei). Il
segnale di comando
(DS, Drive Signal) è
il segnale elettrico generato dal
controllore
interno
(Ci). Attraverso il convertitore elet-
tro-pneumatico E/P, si genera il
segnale di
pressione
(P) che agisce sul cappello della
valvola e che determina la posizione della
valvola (MV, dall’inglese Manipulated
Variable). Il
blocco P
indica il processo fra
MV e PV.
Sperimentalmente, sono stati riprodotti
numerosi malfunzionamenti e guasti tipi-
camente riscontrabili sulle valvole indu-
striali. Per fare ciò è stato impiegato un
dispositivo apposito, montato sopra il cap-
pello della valvola (
υ
figura 2
). Questa
apparecchiatura ha permesso di riprodurre
le anomalie più comuni: attrito statico,
attrito dinamico, perdita di aria e malfun-
zionamento del convertitore E/P. Ulteriori
dettagli sono riportati in
[11]
.
Nella seconda fase del progetto, l’atten-
zione è stata focalizzata sulle principali
cause di oscillazione di un loop e sulle più
comuni cause di anomalia delle valvole.
L’obiettivo è stato quello di sviluppare un
sistema (potenziato) di monitoraggio, che
tenesse conto delle variabili aggiuntive
messe a disposizione dalla strumentazione
intelligente, dando così origine ad una ver-
sione
PCU_N
, con un massimo di
N=6
variabili
.
A tal proposito, sono stati eseguiti nume-
rosi esperimenti nel campo operativo delle
valvole e delle perturbazioni sovraimposte.
Le casistiche esaminate possono essere
considerate rappresentative del comporta-
mento generale del sistema, consentendo
così di trarre alcune importanti conclu-
sioni. Le prove sono state effettuate con
Figura 1 - Diagramma a blocchi di un loop FC con posizionatore
Figura 2 - Le valvole di regolazione modificate


