
















 62 / 116
62 / 116

Pick & place
di precisione
AO
S P E C I
A L E
Serena Monti
imballaggio di alimenti sia per le materie prime, sia
per i prodotti che hanno già un imballaggio prima-
rio, richiede oggigiorno un grado elevato di automa-
zione. Per ampliare il mercato delle applicazioni di
pick&place il produttore di robot ABB, attivo in tutto
il mondo, e Sick hanno sviluppato una soluzione che aggiunge
un’ulteriore dimensione al controllo effettuato dai robot, dimi-
nuendo così la quantità di prodotti danneggiati nel processo.
Questa soluzione si basa sulla tecnologia di visione 3D di Sick e la
tecnologia di automazione di ABB.
La soluzione: un sistema di visione 3D
Nellamaggioranza dei casi applicativi nel campo del pick&place, gli
oggetti si muovono su nastri trasportatori dai quali i robot devono
prelevarli per selezionarli o imballarli. Oggetti di diverse dimensioni
e spessore, che giungono sui nastri trasportatori in posizioni ca-
suali, rappresentano una sfida particolare per i robot che si devono
adattare a questa variabilità intrinseca per poterli prendere.
I classici sistemi di visione 2D sono in molti casi sufficienti, ma non
possono restituire informazioni su altezza e volume, che sono in-
vece necessarie quando i prodotti hanno forma e altezza varia-
APRILE 2018
AUTOMAZIONE OGGI 405
62
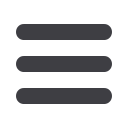
Grazie alla collaborazione fra Sick e
ABB, i robot che impiegano il sistema
IVC-3D sono in grado di effettuare
prelevamenti precisi, lavorazioni
anche delicate e di supportare il
controllo qualità
L’
Sick e ABB hanno sviluppato
insieme una soluzione che
unisce le tecnologie di entrambe
le aziende per creare un
prodotto altamente competitivo
IVC-3D fornisce dati tridimensionali di posizionamento
e informazioni attuali