
















 63 / 116
63 / 116

bili. Infatti i sistemi di visione 2D rilevano gli oggetti basandosi
sul contrasto e il colore. Invece i sistemi di visione 3D forniscono
informazioni sull’altezza e il volume degli oggetti. In tal modo,
gli oggetti possono essere individuati in modo più affidabile e
preciso, anche se il contrasto tra oggetto e sfondo è minimo o
variabile, la dimensione e la forma degli oggetti cambiano, o se
il nastro trasportatore è sufficientemente ampio per causare una
distorsione prospettica se osservato con un sistema di visione 2D.
Fattore chiave per il processo:
l’altezza dell’oggetto
L’informazione sull’altezza dell’oggetto è un fattore decisivo nel
miglioramento del processo di presa. Con un sistema di visione
3D un robot può prelevare gli oggetti rapidamente e in sicurezza
senza entrare in collisione con loro. Questo non solo aumenta l’ef-
ficienza, ma riduce anche il rischio di danneggiamenti. Inoltre, que-
sta tecnologia offre maggiori possibilità per l’ispezione del volume
e del peso e il rilevamento di anomalie nella forma dell’oggetto.
Un ottimo lavoro di squadra
Sick eABBhanno sviluppato insieme una soluzione che unisce le tec-
nologie di entrambe le aziende per creare un prodotto altamente
competitivo. Nello specifico, Sick ha contribuito con la smart camera
IVC-3D e il Belt Picking Toolkit, un software che permette a IVC-3D di
rilevare gli oggetti in base alla loro altezza. Per una messa in opera
semplice, Toolkit dispone di un’interfaccia grafica su web che per-
mette all’utente di impostare i parametri relativi a oggetti e nastro
trasportatore. Seguendo una procedura guidata passo per passo si
possono calibrare la telecamera e il robot in un sistema di coordi-
nate comuni. La telecamera precalibrata IVC-3D coniuga illumina-
zione, acquisizione e analisi delle immagini in un unico dispositivo.
Sfruttando il principio di triangolazione laser, la telecamera può ac-
quisire dati in tre dimensioni, rendendo semplice la presa di oggetti
che prima erano difficili da gestire. I dati trasmessi contengono sia
coordinate di posizione tridimensionali, sia informazioni temporali.
La combinazione di questi dati permette adABB di controllare il pro-
cesso di presa sia nello spazio tridimensionale, sia nel tempo. ABB
ha contribuito alla soluzione con i suoi robot. Nella maggior parte
dei casi vengono utilizzati il robot veloce IRB360 FlexPicker e l’unità
di controllo della linea con il software Pick-Master. Questo software
funge anche da interfaccia tra la camera IVC-3D e i robot. Ai robot
vengono costantemente trasmesse le informazioni necessarieper ef-
fettuare la presa degli oggetti nelle posizioni e nei momenti corretti,
in base alle coordinate fornite dalla telecamera IVC-3D e alla velocità
di movimento del nastro trasportatore. Così gli oggetti possono es-
sere prelevati inmodo affidabile, rendendoquesta soluzione interes-
sante per lamaggior parte dei costruttori di questo tipodi macchine.
Impiego flessibile per una manipolazione
delicata dei prodotti
Grazie a identificazione e posizionamentodegli oggetti basati anche
sull’altezza si riducono le perdite di qualità e i tempi di fermo mac-
china durante le applicazioni complesse di pick&place. Oggetti dalla
forma irregolare, come pasta imballata in sacchetti, formaggio fre-
sco, noci, frutti di bosco surgelati, quindi facili a rompersi, verdura
ecc., possono venire trattati ora in modo più delicato. Anche se la
forma, il contrasto, l’orientamento e la dimensione delle confezioni
variano, il sistema di visione 3D di Sick lavora generando una quan-
tità minore di prodotti danneggiati e anche il set up è più semplice
rispetto alle tecnologie 2D. In questo modo, i robot pick&place pos-
sonomanipolare i prodotti inmodo più controllato e offrire così una
lavorazione più delicata degli alimenti, garantendo anche una gra-
devole degustazione al consumatore.
•
ABB -
www.abb.it- Sick -
www.sick.itCon un sistema di visione 3D un robot
può prelevare gli oggetti rapidamente
e in sicurezza senza entrare in collisione con loro
APRILE 2018
AUTOMAZIONE OGGI 405
63
Il sistema di visione 3D IVC-3D
Misurare, posizionare, controllare la qualità: con IVC-3D si possono
risolvere molti compiti in modo affidabile ed efficiente. Oltre che
per l’impiego nell’industria automobilistica ed elettronica, IVC-3D è
adatto per le esigenze specifiche del settore dell’elaborazione degli
alimenti. Nella variante con
involucro in acciaio
inox, con grado di
protezione IP67, il
sensore è facile da
pulire e resistente
agli agenti chimici dei detergenti
(testato da Ecolab).
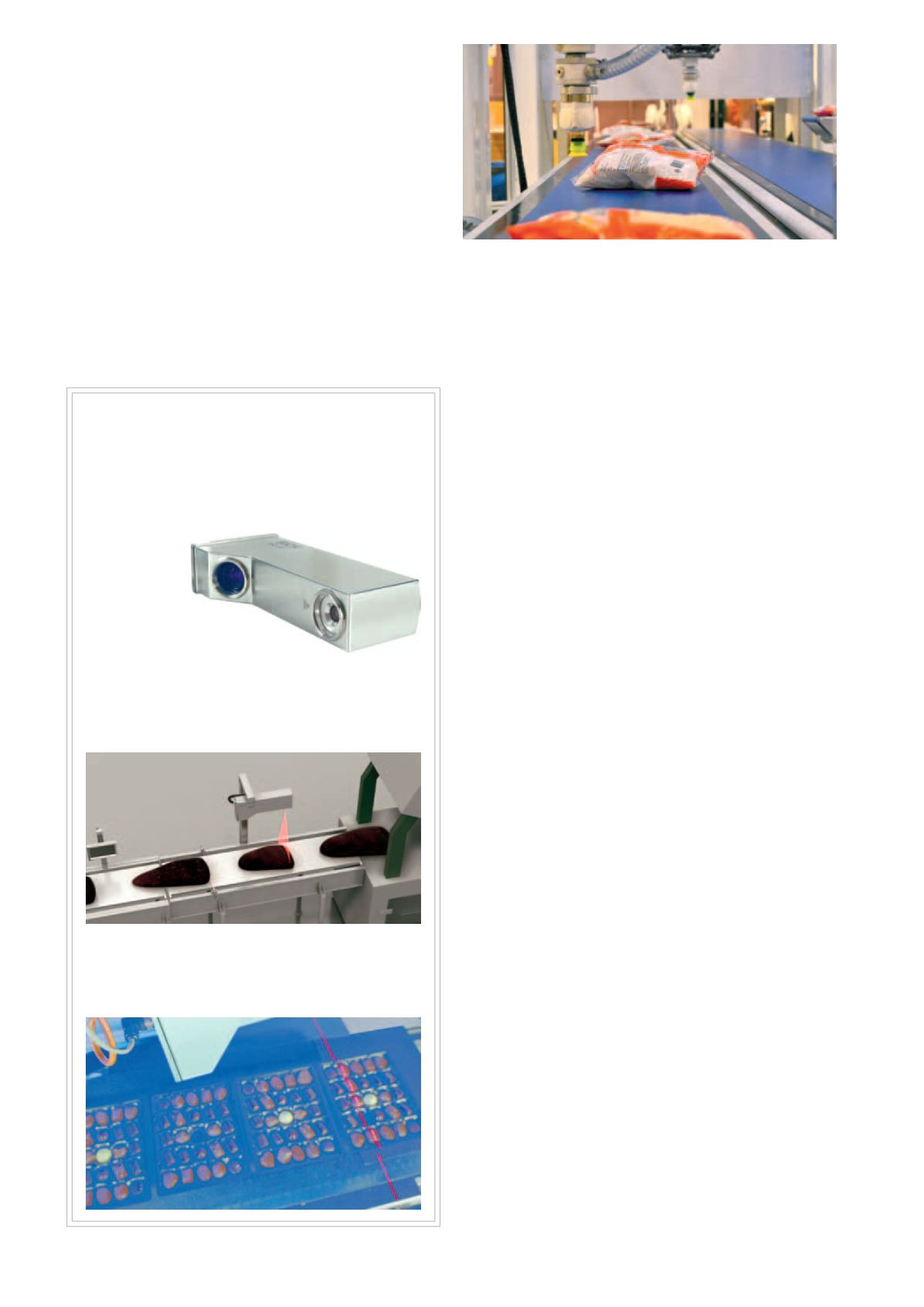
Ottimizzazione del processo di taglio: le informazioni su forma e
volume degli alimenti aiutano il rilevamento della posizione ottimale
di taglio, il che riduce gli scarti e consente di risparmiare sui costi.
Verifica della completezza degli imballaggi: gli imballaggi incompleti
vengono riconosciuti in modo affidabile e trasportati fuori dal per-
corso, in questo modo si prevengono forniture sbagliate.