


















 16 / 34
16 / 34

MACHINE AUTOMATION 2014
16
A
C
H
I
N
E
A
U
T
O
M
A
T
I
O
N
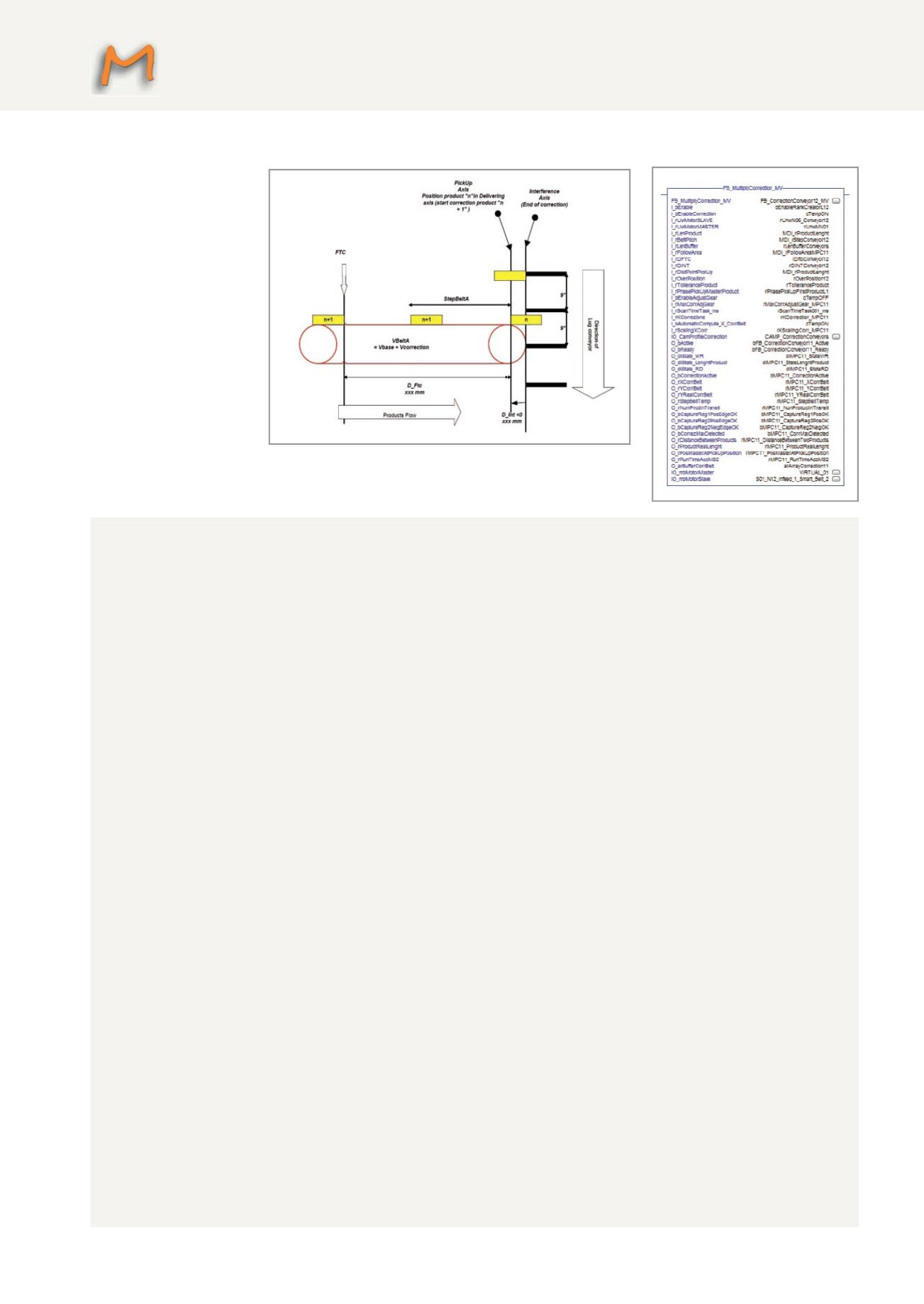
Explication of FB_MultiplyCorrection_MV I/O:
I_bEnable
BOOL: Enable of function block
I_bEnableCorrection
BOOL: Enable the corrections
I_rUnwMotorSlave [units]
REAL: Unwinding motor belt
I_rUnwMotorMaster [units]
REAL: Unwinding motor master
I_rProductLength [units]
REAL: product length
I_rBeltPitch [units]
REAL: Pitch of the belt every master cycle
I_rLenBuffer InOut
REAL: Lenght of buffer where are freezed the positions of the belt on edge positive trigger of photoeye (must be longer then the number of product
on the belt =ROUND (Belt length / Belt pitch) +1 ). Maximum value =50.
I_rFollowingArea
REAL: 0% Correction always positive; 100% correction always negative 50% shortest path
I_rDftc [units]
REAL: distance between photoeye and delivering axis
I_rDint [units]
REAL: distance between interference axis and delivering axis
I_rDistPointPickUp [units]
REAL: distance from product head where I want to pick up the product
I_rOverPosition [units]
REAL: if <>0 the delivering axis is shifted of that value
I_rTolleranceProduct [units]
REAL: tolerance of product (used to rearm the photo-eye after product length+tolerance product)
I_rPhasePickUpMasterProduct [units]
REAL: phase of lug conveyor where I want to phase the product
I_bEnableAdjustGear
BOOL: enable the filter PI for errors
I_rMaxCorrAdjustGear
REAL: max error that is considered in the filter adjust gear
I_rScanTimeTask_ms
REAL: task time where the function block runs.
I_rKCorrection [%]
REAL: percent of correction. If O_rXcorrMasterUnits > BeltPitch the correction=Error, If NOT correction = (I_rKCorrection /100)*error.
I_rAutomaticComputeXcorrBelt
REAL: IF ON the FB calculate automatically the O_rXcorrMasterUnits, IF NOT O_rXcorrMasterUnits=I_rScalingXCorr
IO_CamProfileCorrection
CAM_PROFILE[2]: camp profile of 2 point (poly 3)
O_bActive
BOOL: FB active
O_bReady
BOOL: FB ready
O_diStateWR
DINT: value of the write state
O_diStateRD
DINT: value of the state RD
O_bCorrectionActive
BOOL: Correction of the belt is active
O_rXcorrBelt [units]
REAL: scaling master for the cam in master units
O_rYCorrBelt [units]
REAL: correction in slave units
O_rYRealCorrBelt [units]
REAL: correction in slave units filtered by I_rKCorrection
O_rStepBeltTemp [units]
REAL: pitch of belt filtered by adjust gear
O_rNumberProductInTransit
REAL: number of products registered by photo-eye but not yet delivered
O_bCaptureReg1PosEdgeOK
BOOL: registration 1 OK on positive edge
O_bCaptureReg2PosEdgeOK
BOOL: registration21 OK on positive edge
O_bCaptureReg2NegEdgeOK
BOOL: registration 2 OK on negative edge
O_bCorrMaxDetected
BOOL: max correction detected
O_rDistanceBetweenTwoProducts [units]
REAL: distance between two products
O_rProductRealLength
REAL [units] : product length checked
O_rPosMasterAtPickUpPosition [units]
REAL: position of master when the tail of product is on pick up axis
O_rRunTimeAccMS2[units*1000/s2]
REAL: acceleration in m/s2 if units=mm
O_arBufferCorrBelt [units]
ARRAY of REAL[50]: buffer of corrections
IO_mbMotorMaster
AXIS: master
IOmbMotorSlave
AXIS: axis slave
nastro A è triggerato dalla
fotocellula, a questo punto
si calcola l’errore di fase
rispetto al lug conveyor e
si corregge il prodotto ac-
celerando o decelerando il
nastrino A. La correzione è
sovrapposta al gearing con
una cam. La correzione
deve terminare quando il
fronte del prodotto arriva
su Interference axis, da cui
in poi la velocità del nastro
A è uguale alla velocità del
nastro ‘Double belt mecha-
nic’, devo attendere che il
retro del prodotto arrivi sul
Delivering axis, calcolare la correzione per il prossimo prodotto ed
effettuarla. È molto importante che Dint sia <0 e più alto possibile
come spiegato nel caso
del FB_GroupOrganizer.
Art of motion -
www.art-of-motion.it