Automazione e Strumentazione
■
Aprile 2014
SICUREZZA BORDOMACCHINA
speciale
57
alle normeEN Iso 13849-1 eEN IEC 62061. A
livello progettuale sono coinvolti anche dispo-
sitivi complementari come gli arresti di emer-
genza divisi in categorie secondo le norme EN
IEC60204eEN IEC60947-5-5.Lavalutazione
dei rischi offre comunque alle aziende certezza
giuridica anche sui prodotti che non rientrano
nella Direttiva Macchine. Tale processo com-
bina l’analisi, la valutazione e la riduzione dei
rischi e si può suddividere in differenti aspetti
operativi.
Costruzione di macchine sicure
Il concetto di sicurezza funzionale a bordo
macchina è relativamente recente e sostituisce
le categorie di sicurezza definite dalla norma
EN 954-1. La sicurezza funzionale viene defi-
nita come “quota della sicurezza che dipende
dal corretto funzionamento di un sistema di
sicurezza”. Con “funzionamento corretto” si
intende che il sistema deve eseguire corret-
tamente una funzione di sicurezza. Le norme
relative alla sicurezza funzionale aiutano i pro-
gettisti a focalizzarsi sulle funzioni effettiva-
mente necessarie a ridurre ogni singolo rischio,
oltre che sui livelli prestazionali richiesti a cia-
scuna funzione. L’attuale norma Iso 13849-1 è
stata invece emanata come norma armonizzata
nell’ambito dellaDirettivaMacchine.
La prin-
cipale novità della norma EN Iso 13849-1 è
l’approccio probabilistico per la valutazione
dei sistemi di comando correlati alla sicu-
rezza accompagnato dal livello di presta-
zioneoPerformanceLevel (PL)
.Questopara-
metro è descritto da quattro grandezze: catego-
ria (requisito strutturale), tempo medio ad un
evento pericoloso (MTTF
d
), grado di copertura
diagnostica (DC) e guasti per cause comuni
(CCF). Il Performance Level indica la capacità
della parte del sistema di controllo della mac-
china relativo alla sicurezza (SRP/CS, Safety-
Related Parts of Control System) di garantire
la protezione entro predefinite condizioni di
funzionamento. Alla sua base sta la probabi-
lità media di guasto pericoloso/ora (PFHd). È
considerato pericoloso un guasto che, se non
rilevato, inibisce la funzione di protezione del
sistema. Sonoprevisti 5 livelli, daPLa a PLe.
Per ogni funzione di sicurezza individuata (tra-
mite l’uso della Iso 14121 – Risk Assessment)
il progettista decide il contributo alla riduzione
del rischio che essa deve fornire, ossia il PLr.
Sicurezza Funzionaledei sistemi
di controllo
La norma IEC 62061 si basa su due concetti
fondamentali, la
gestione della sicurezza fun-
zionale
e il
livello di integrità della sicurezza
o
Sil (Safety Integrity Level)
. Nella gestione
della sicurezza funzionale vengono preci-
sati gli aspetti del processo di progettazione
necessari per raggiungere la sicurezza funzio-
nale richiesta. Per ogni progetto deve essere
redatto un
piano della sicurezza funzionale
dove vengono individuate le risorse responsa-
bili delle attività di progettazione e costruzione
del sistema di sicurezza. Per l’assegnazione del
Sil occorre valutare il grado di severità (Se) del
possibile danno, la frequenza e la durata (Fr) di
esposizione al pericolo, la probabilità di evento
pericoloso (Pr) legata al modo operativo della
macchina e l’evitabilità (Av) del pericolo. La
somma dei punteggi ottenuti per gli attributi di
frequenza, probabilità ed evitabilità fornisce la
classedi probabilitàdel danno (Cl). Incrociando
la classe ottenuta (Cl) con il grado di severità
individuato (Se) si ottiene il Sil che nellemac-
chine può assumere 3 livelli (Sil 1, Sil 2, Sil 3).
Il Sil rappresenta quindi il livello di integrità
della sicurezza che deve essere attribuito a uno
SRECS (sistemadi controllodi sicurezza) affin-
ché sia idoneo a svolgere la funzione di sicu-
rezza assegnata per tutto l’intervallo di tempo
stabilito e nelle condizioni d’uso previste. Il
parametrousatopermisurare il Sil è la probabi-
lità di guasto pericoloso/ora (PFHd). Maggiore
è il Sil, minore è la probabilità che lo SRECS
non esegua la funzione di sicurezza richiesta.
Nella realizzazione di sistemi SRP/CS, i PLC
di sicurezza, i safety bus, gli azionamenti, le
barriere fotoelettriche e ingenere tutti i disposi-
tivi complessi di sicurezza che integrano logica
programmabile e che fanno uso di software
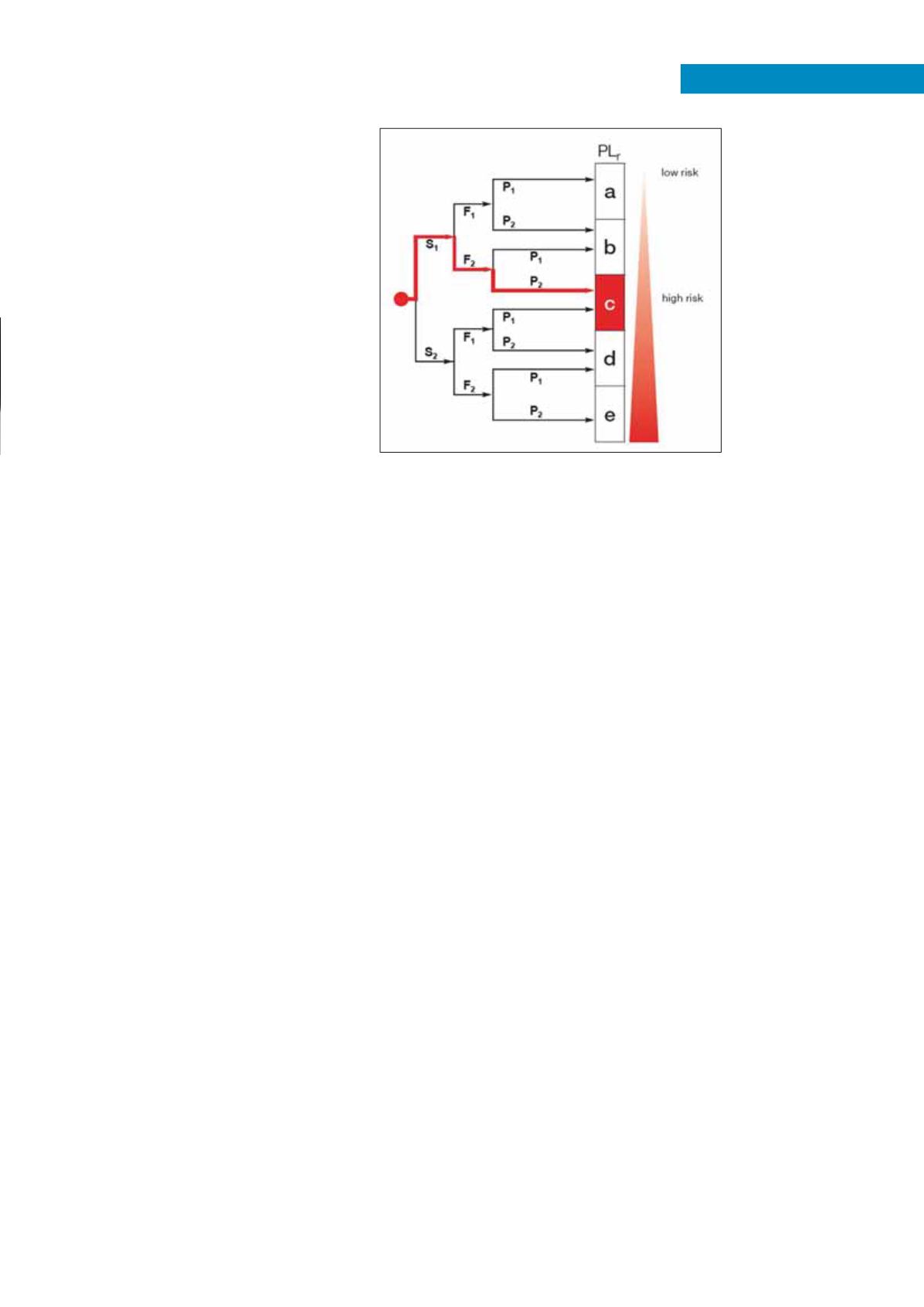
Schema di valutazione del rischio, determinazione del
livello di prestazione richiesto PLr


