


















 59 / 118
59 / 118

APRILE 2015
AUTOMAZIONE OGGI 380
59
robot in qualsiasi
posizione e altezza
all’interno della cella.
Le stazioni di con-
trollo collegate pos-
sono dunque essere
ruotate in modalità
set-up, aumentan-
done ulteriormente
l’accessibilità. Anche
la pulizia del sistema
è notevolmente sem-
plificata e migliorata
da questa struttura.
Infatti, l’interfaccia
operatore, compo-
sta da un Panel PC
CP6203 integrato, può essere spostata in modo molto flessibile
tramite il braccio rotante di quasi 360°.
Kinetics Library: ingegneria semplice
ed efficace
Il Panel PC CP6203 integrato con touchscreen da 19 pollici di-
spone di sistema operativo Intel Core 2 di Windows XP e TwinCAT
NC I come software di controllo. Il vantaggio principale consiste
nel disporre di funzioni cinematiche robot preconfigurate che
semplificano notevolmente il processo di progettazione. Twin-
CAT Kinematik Trasformation (level 3) offre una soluzione eccel-
lente per un robot delta, in particolare quando è progettato per
il trasporto efficiente ad alta velocità e con un meccanismo rela-
tivamente semplice.
All’inizio del processo di sviluppo, circa tre anni fa, Beckhoff era
uno dei pochissimi fornitori con un sistema di controllo aperto,
grazie al quale è stato possibile soddisfare tutte le esigenze, con
un modulo di cinematica specifico e su misura. Grazie alla fles-
sibilità di TwinCAT, c’è stato anche spazio sufficiente per l’adat-
tamento individuale sul lato software. Pertanto, le posizioni del
robot delta non sono controllate da un programma NC, ma diret-
tamente nel software tramite TwinCAT PLC. Questo concetto ha
semplificato in modo significativo il controllo sequenziale.
Cinque servodrive e due motori stepper forniscono in modo
dinamico le specifiche posizioni: tre azionamenti dual-channel
AX5206 muovono tre assi del robot o le tavole rotanti delle due
stazioni di controllo di superficie, realizzati con tre servomotori
AM3033 e due AM3022. Inoltre, due terminali EL7031 con motori
passo-passo AS1000 controllano la stazione intermedia di svolta,
con l’ausilio di due accoppiatori Ethercat EK1100 per un totale di
55 terminali Ethercat per l’elaborazione dei dati di I/O.
Controllo PC e architettura di controllo
integrato
Il PC control offre grandi vantaggi per via della sua architettura
di controllo integrata inclusa l’integrazione delle cinematiche del
robot. Inoltre, la sicurezza della macchina è anch’essa parte in-
tegrante del sistema tramite TwinSafe di Beckhoff, consentendo
così di semplificare in modo significativo l’ingegneria e ridurre
il costo totale della soluzione. La realizzazione è stata possibile
con EL6900 TwinSafe PLC, quattro terminali di ingresso digitale
EL1904 e un terminale di uscita digitale EL2904. Le funzioni di
sicurezza per l’arresto di emergenza (STO) e controllo delle porte
di sicurezza sono state attuate in questo modo con l’aggiunta dei
servo drive AX5805 e AX5206. Beneficiare di Ethercat offre elevate
prestazioni, ma anche il vantaggio di comunicazione di dati uni-
versale. L’obiettivo fin dall’inizio è stato quello di acquisire dati di
I / O, risolvere le sfide di sicurezza, e sincronizzare le unità con un
sistema di bus completo.
Anche l’uso di TwinCAT HMI offre vantaggi, in quanto, grazie alla
visualizzazione perfettamente integrata, le variabili richieste sono
universalmente disponibili senza l’esportazione o l’importazione
di dati. Di conseguenza, cambiamenti di variabili, ad esempio,
possono essere eseguite velocemente e senza errori.
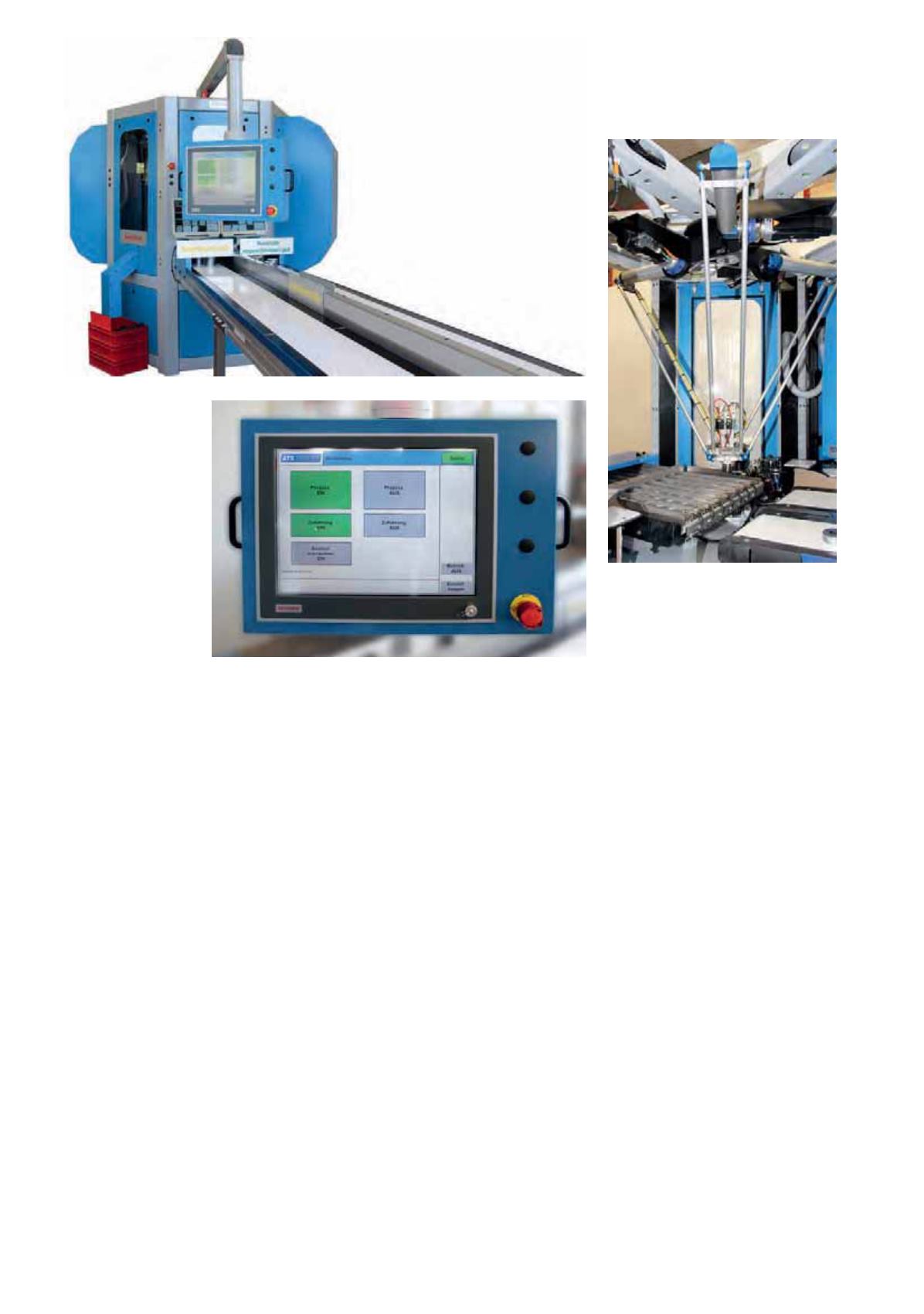
t
Beckhoff Automation -
www.beckhoff.itControl e Drive Technology di
Beckhoff, dal Panel PC CP6203
attraverso i servomotori AM30xx,
consente il controllo dinamico del
delta robot e sequenze di test
rapide e precise
Panel PC integrato CP6203 da 19 pollici
Nella cella di prova ATS
per Brüggli Industrie, un
robot delta assume la com-
pleta gestione di fustellati