
















 65 / 68
65 / 68

FEBBRAIO 2017
FIELDBUS & NETWORKS
65
di utilizzare una configurazione ridondata con due mezzi fisici che scor-
rono lungo l’intero treno. Il protocollo di trasmissione utilizzato prevede
un tempo di ciclo di 25 ms, con un funzionamento deterministico che
permette il trasferimento affidabile delle informazioni critiche legate
al controllo della marcia e della sicurezza del treno.
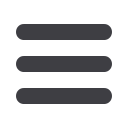
Il bus WTB viene controllato da un nodo che agisce come master, al
quale è demandato il compito di interrogare regolarmente i nodi slave,
con una periodicità che dipende dal tipo di veicolo (le locomotive ven-
gono interrogate più frequentemente delle carrozze). La ridondanza del
mezzo fisico fa sì che un nodo trasmetta su entrambe le linee simulta-
neamente. Un nodo riceve i segnali su una linea, ma monitora anche
l’altra e una funzione di supervisione della qualità del segnale ricevuto
può ordinare lo scambio dei ruoli. Inoltre, qualora un nodo master si
guasti, un altro dei nodi disponibili ne può prendere il posto (si veda
Figura 2).
Per facilitare le operazioni, il bus WTB supporta in modo nativo la
configurazione dei singoli nodi e segmenti che possono comporre in
treno. Durante la procedura iniziale di ‘inauguration’, ai singoli nodi
vengono assegnati gli indirizzi corrispondenti in base alla direzione
in cui è orientato il treno e alla sua composizione in convogli unici o
separabili.
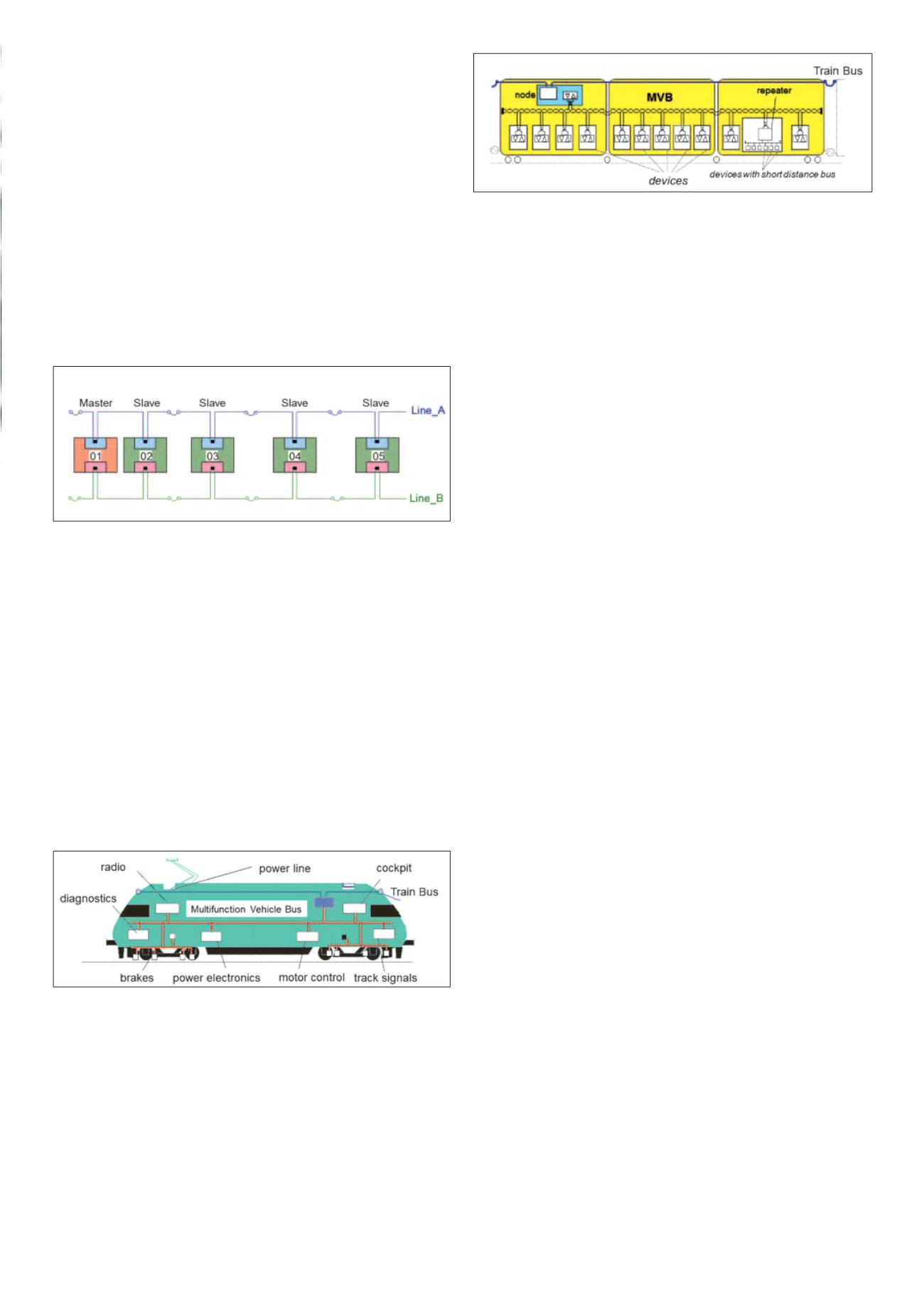
Come anticipato in precedenza, ai nodi di una rete WTB può essere
collegata la rete MVB del singolo veicolo. La rete multifunzione MVB
ha svolto un ruolo importante per facilitare la diffusione delle apparec-
chiature elettroniche in ambito ferroviario, promuovendo l’interopera-
bilità tra dispositivi di costruttori diversi, che possono scambiare dati
in un ‘linguaggio comune’, così come avvenuto per altri tipi di fieldbus
in ambito industriale (si veda Figura 3).
La rete multifunzione MVB funziona con una velocità di trasmissione di
1,5 Mbps su un supporto fisico costituito da un’interfaccia RS485, un
doppino schermato con trasformatore di isolamento o una fibra ottica.
Il tempo minimo di risposta è di 1 ms e la rete supporta fino a 255
stazioni programmabili e fino a 4.096 semplici sensori/attuatori.
Sebbene l’architettura classica di una rete MVB preveda la sua ado-
zione all’interno di un singolo veicolo (locomotiva o carrozza), in realtà
nulla vieta di estendere la stessa su più veicoli (si veda Figura 4), ri-
spettando l’estensione di lunghezza massima di 200 m con cablaggio
in rame e 2 km con cablaggio in fibra.
Anche per la rete MVB, lo standard prevede la possibilità di adottare
configurazioni ridondate per garantire un maggiore livello di affidabilità.
I protocolli utilizzati sulle reti MVB eWTB, che insieme compongo la rete
del treno, sono gli stessi e sono stati progettati per supportare la trasmis-
sione con tempi di risposta massimi deterministici e con la possibilità
di identificare rapidamente eventuali errori di trasmissione. I protocolli
di base consentono di acquisire dati rapidamente, gestire il controllo di
flusso e supportano sia le comunicazioni punto-punto, sia le comunica-
zioni broadcast. La natura aperta delle specifiche del bus ha permesso
poi di sviluppare ulteriori standard dedicati alla trasmissione a sicurezza
garantita per le applicazioni più critiche legate al controllo della marcia
del treno. Il protocollo vitale di sicurezza utilizzato sulle locomotive per
gestire la marcia secondo le autorizzazioni del sistema di segnalamento,
per esempio, utilizza il bus MVB per il trasporto delle informazioni, ag-
giungendo le funzioni crittografiche e di rilevamento avanzato degli errori
secondo i più elevati standard di sicurezza necessari. Sullo stesso bus
MVB possono essere trasportate sia le informazioni non vitali per la sicu-
rezza, sia quelle critiche, utilizzando un’architettura condivisa e a sicurezza
garantita.
Applicazioni diversificate
La standardizzazione della rete di comunicazione treno ha permesso di
supportaremolteplici applicazioni da parte degli operatori ferroviari, spin-
gendo l’industria a proporre soluzioni interoperabili che potessero favo-
rire la riduzione dei costi di manutenzione e l’introduzione di nuovi servizi
per i passeggeri. Il bus di comunicazione treno, per esempio, supporta
le applicazioni di telecomando, che possono essere utilizzate per gestire
la trazione in comando multiplo (locomotiva di coda telecomandata da
quella di testa, treni reversibili con carrozza pilota ecc.), così come per
l’automazione del blocco porte, l’accensione e il controllo degli impianti
di illuminazione e di condizionamento.
Il bus WTB ha svolto un ruolo fondamentale per favorire la raccolta di
informazioni diagnostiche sia di tipo legale imposto dalle norme, sia di
tipo preventivo e reattivo per facilitare le operazioni di manutenzione degli
apparati presenti sul treno. Infine, la disponibilità in ogni punto del treno
di un nodo di comunicazione ha permesso nel tempo di introdurre sui
treni tutta una serie di nuove funzionalità più specificatamente orientate
al comfort dei passeggeri, come l’indicazione delle fermate successive,
dei ritardi, lo stato delle prenotazione dei singoli posti e così via.
L’espansione delle soluzioni Ethernet e IP
Negli ultimi anni è fisiologicamente cresciuta la necessità da parte degli
operatori ferroviari di introdurre nuovi servizi dedicati ai passeggeri, che
hanno ulteriormente fatto crescere la ‘domanda’ di comunicazione a bordo
treno e dal treno verso l’esterno. Per garantire la sicurezza fisica a bordo,
per esempio, si possono installare dei sistemi di videosorveglianza, sia con
archiviazione locale delle immagini, sia con trasmissione in diretta verso
un centro di vigilanza esterno. Altra evidente necessità è l’erogazione di
sistemi informativi emultimediali più evoluti, come accesso a Internet tra-
mite wi-fi, informazioni sul viaggio e le località di destino, così come lo
streaming di musica e film. Tutte queste applicazioni, non critiche dal punto
; À
# (*]
$( * ] %
' ^ _J] $_
J + ] % +
"
+
+
"
> ; À
_J]
8 "
ferroviari
Fonte: Bombardier Transportation
Fonte: Bombardier Transportation