
















 61 / 68
61 / 68

FEBBRAIO 2017
FIELDBUS & NETWORKS
61
AS-Interface (AS-i)
AS-i (Actuator Sensor Interface) è un bus industriale di basso li-
vello che si contraddistingue per i costi ridotti e la semplicità di
installazione e manutenzione. Frutto della collaborazione di un
consorzio di costruttori, le specifiche AS-i dettagliano lo strato
fisico, quello di accesso ai dati e il protocollo di comunicazione di
un bus master-slave su un doppino in rame.
Un sistema AS-i è costituito da quattro componenti fondamen-
tali: un master di rete (che può essere un gateway verso una rete
industriale di livello superiore o una scheda di interfacciamento
con un PLC), un alimentatore, un certo numero di nodi slave (cui
afferiscono gli I/O di sensori, attuatori e dispositivi di emergenza)
e infine un cavo bifilare sul quale viaggiano sovrapposti alimenta-
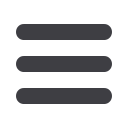
zione e dati. Nella sua incarnazione più caratteristica, i nodi slave
si connettono tramite economiche prese vampiro a una piattina
gialla dalla guaina autoripristinante. Successivamente è stata in-
trodotta una variante basata su cavo tondo, connettori circolari
Eurofast e ciabatte di giunzione (brick) per la diramazione delle
connessioni.
Il master richiede informazione per mezzo di un frame da 14 bit,
dei quali 5 bit sono l’indirizzo del dispositivo interrogato e 4 bit
sono dedicati a ogni pacchetto dati; la risposta dello slave richiede
invece solo 7 bit, dei quali 4 rappresentano il dato comunicato. Il
determinismo nelle
comunicazioni AS-i
è associato all’impo-
sizione di un tempo
massimo entro il
quale ogni nodo slave
deve rispondere all’in-
terrogazione da parte
del master.
Nella sua prima ver-
sione, l’interfaccia
AS-i prevedeva un
massimo di 31 slave
per rete, ciascuno in
grado di gestire un
massimo di 4 I/O di-
screti per un totale
di 124 ingressi e 124
uscite con un tempo di ciclo di 5 ms. Con l’introduzione della ver-
sione 2.11 il numero di slave ammessi è raddoppiato, ma avendo
riservato un bit di selezionamento, è stata sacrificata un’uscita
digitale. La versione 3.0 ha ampliato il numero di I/O digitali e ha
aggiunto la possibilità di definire nativamente un canale analogico
a 8, 12 o 16 bit.
L’interfaccia AS-i è supportata da numerosi produttori di dispo-
sitivi industriali e, tramite opportuni gateway, viene spesso im-
piegata come estensione verso il campo di bus con un superiore
livello di sofisticazione, come Devi-
cenet, Profibus e diverse varianti di
Ethernet industriale. La soluzione è
particolarmente indicata per l’im-
plementazione di meccanismi di
sicurezza funzionale nelle applica-
zioni di arresto e fermo macchina di
emergenza. La tecnologia ‘Safety at
Work’ consente infatti di integrare
sulla stessa rete anche i dispositivi
di sicurezza (funghi per l’arresto di
emergenza, interruttori accoppiati,
barriere ottiche ecc.), con presta-
zioni conformi agli standard SIL3 (EN
62061), PL e (ISO 13849-1) e Cat.4
(EN 954-1). I dati di sicurezza ven-
gono veicolati sul bus per mezzo di
un codice dinamico, una tabella 8x4
bit univocamente associata a ciascun
dispositivo di emergenza e memoriz-
zata in fase di configurazione in un controllore dedicato (Safety
Monitor). Durante il funzionamento dell’impianto il Safety Monitor
confronta la tabella ciclicamente inviata dai dispositivi con i codici
in memoria e in caso di difformità prende le misure necessarie alla
messa in sicurezza dell’impianto.
CAN e le sue varianti
Uno degli standard più diffusi nelle soluzioni di basso livello negli
impianti industriali è CAN, Controller Area Network. Inizialmente
sviluppato da Bosch per applicazioni in ambito automotive, CAN
viene oggi impiegato per connettere PLC, sensori e attuatori in am-
bito automazione industriale, per creare reti di contatori intelligenti,
per gestire impianti domotici, macchine utensili e strumentazione
di laboratorio. CAN è uno standard di comunicazione che consente
di realizzare reti di microcon-
trollori per mezzo di un bus
seriale e di un robusto proto-
collo orientato ai messaggi.
Le specifiche CAN descri-
vono solo gli strati fisico e di
collegamento dati della pila
" # À
$
"
%
"
Fonte www.pixabay.com