
















 74 / 102
74 / 102

MAGGIO 2016
FIELDBUS & NETWORKS
74
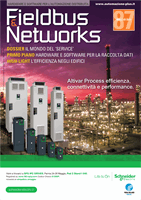
frame individuali la propagazione dei disturbi rappresenta sempre
un fattore critico, che determina quasi sempre un effetto domino.
Nel caso di Ethercat, al contrario, i tempi di ritrasmissione del se-
gnale sono talmente brevi che un disturbo all’inizio di un frame non
può agire contemporaneamente sulla fine di un frame precedente
in un nodo adiacente. Nel caso di corruzione di più frame, è anche
difficile definire il tipo di errore risultante. In questo caso alcuni
dati di ingresso sono aggiornati, mentre altri appartengono al ciclo
precedente. L’affermazione che con questa modalità possono veri-
ficarsi solamente errori singoli non è dunque vera. In compenso è
necessaria una strategia di gestione degli errori molto più sofisti-
cata e complessa.
Inoltre, la maggior parte degli switch o bridge ritrasmettono un
frame solo dopo averlo ricevuto completamente (‘store&forward’),
il che fa sì che ogni interfaccia sia raggiunta da frame diversi nel
medesimo istante di tempo e ha come conseguenza che la propa-
gazione dei disturbi possa influenzare un numero elevato di frame.
Un feedback può contribuire a velocizzare
la gestione degli errori
Per ragioni di efficienza, i protocolli basati su approccio a frame
individuali non forniscono un feedback immediato. Un feedback di-
retto sull’aggiornamento dei dati di uscita richiederebbe un ulteriore
scambio bidirezionale di informazioni tra il master e lo slave. Questo
raddoppiamento del tempo di trasferimento dei dati rappresente-
rebbe pertanto un fattore limitante per il tempo ciclo. Di conse-
guenza, la reazione alla perdita di frame individuali contenenti i dati
di uscita dei singoli nodi della rete è limitata, senza notifica diretta
all’unità di controllo. In una situazione del genere il master non è
in grado di intraprendere alcuna azione correttiva immediata. Un
errore di questo tipo può essere riportato all’unità di controllo solo
nel successivo ciclo dei dati di ingresso. Prima che scatti il timeout
di errore, il sistema richiede normalmente tre cicli.
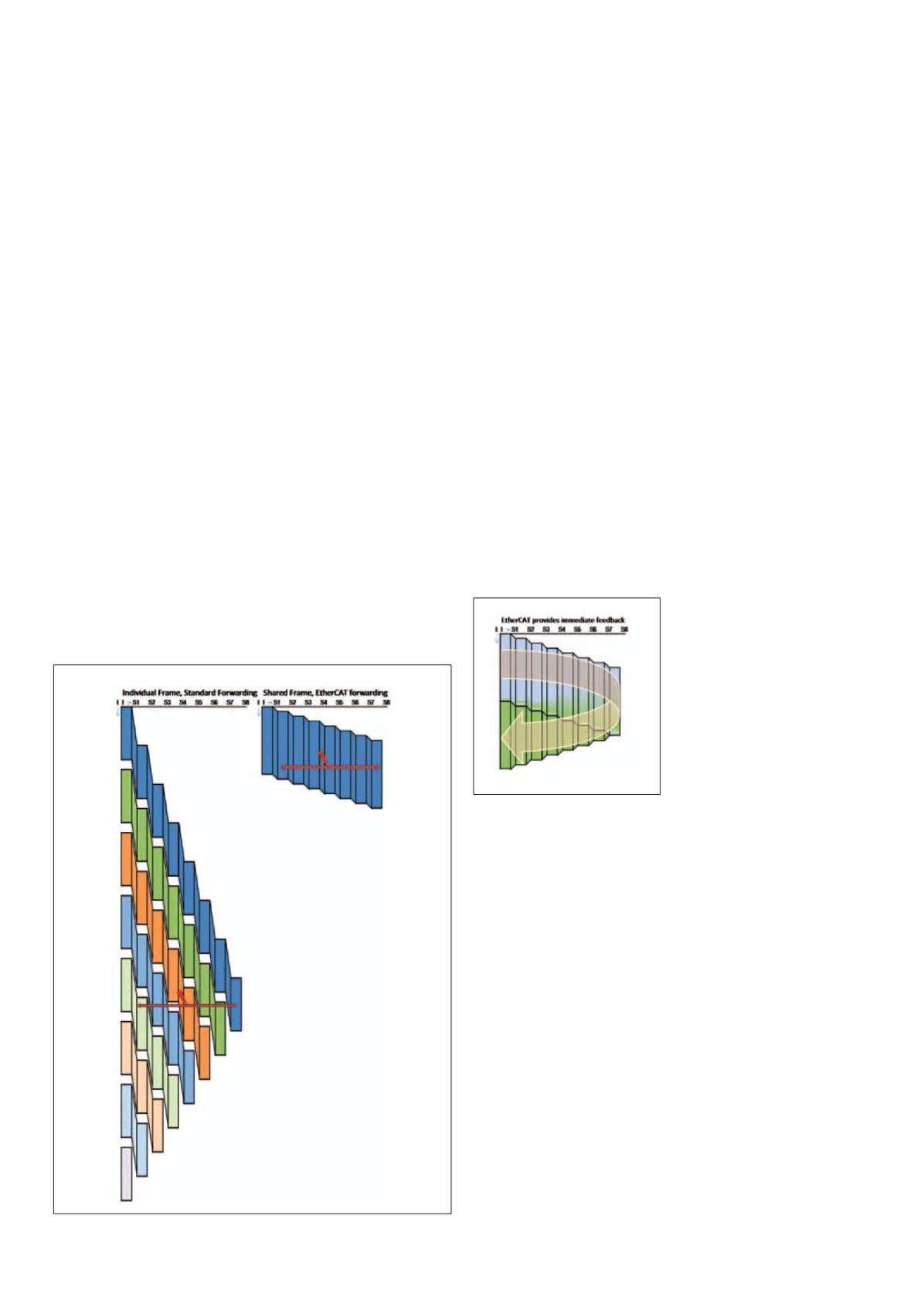
Ethercat opera invece con un feedback diretto da parte degli slave.
Grazie ai rapidi tempi di propagazione, i dati di ingresso vengono
ricevuti dal master immediatamente dopo aver trasmesso i dati di
uscita. Nel caso in cui non venga ricevuto un feedback positivo,
il master può adottare immediatamente misure corrispondenti.
Inoltre, grazie alla ridotta variabilità dei tempi di propagazione, è
possibile avere un timeout molto preciso. Ethercat opera quindi in
linea di principio come un bus di campo classico, nel quale una ritra-
smissione dei dati può avvenire immediatamente. Poiché, tuttavia,
quest’ultima aumenta la complessità del trattamento degli errori
da parte del master e la disponibilità dei dati di processo attuali è
maggiormente desiderabile rispetto a sprecare ampiezza di banda e
potenza di calcolo per riparare dati obsoleti, Ethercat punta piutto-
sto a garantire ridotti tempi ciclo, riducendo in questo modo anche
gli effetti di possibili errori.
Maggiore efficienza consente minori tempi
ciclo e migliore soppressione di errori
Ultimo aspetto, ma non di minore importanza: in confronto a solu-
zioni che utilizzano frame individuali, con Ethercat è possibile rag-
giungere tempi ciclo decisamente inferiori (nell´esempio pari a un
fattore sei), il che a sua volta conduce a una precisione di controllo
decisamente più elevata, così come a una maggiore robustezza.
Questo garantisce una qualità
della produzione decisamente
superiore, così come una più ra-
pida reazione all´errore. Garan-
tire ridotti tempi ciclo è un buon
mezzo per migliorare la qualità
dei risultati anche a fronte di
errori. E, qualora non si verifi-
chino errori, tale qualità diventa
ovviamente ancora migliore.
Ethercat offre quindi un’ottima
soluzione per poter operare con
successo anche in un ambiente
disturbato.
Affidabilità e riduzione degli errori
In sintesi, la soluzione Ethercat costituisce la base per la realiz-
zazione di una rete affidabile, l’occupazione di banda contenuta
porta a un ridotto tasso di errore e la trasmissione veloce dei frame
previene dalla propagazione degli errori. Grazie alla connessione
punto-punto tipica di Ethernet è possibile prevenire riflessioni così
come altri disturbi. Ciò rende la comunicazione più affidabile grazie
a una probabilità di errore decisamente ridotta e alla possibilità di
localizzare facilmente gli errori stessi. L’affidabilità dei sistemi può
inoltre essere influenzata positivamente sia dalla ridotta comples-
sità del protocollo, sia dalla quantità inferiore di dati trasmessa sui
singoli segmenti della rete. Una buona progettazione rappresenta la
base per un buon controllo del sistema, necessario per una durevole
operatività di quest´ultimo.
Ethercat conferma quindi il principio fondamentale dell´automazione
industriale: l’efficienza e l’affidabilità sono due facce della stessa
medaglia.
ETG-Ethercat Technology Group
www.ethercat.orgFigura 3 - Con una propagazione lenta vengono compromessi
molti frame
Figura 4 - Feedback diretto
con Ethercat
Fonte Karl-Martin Skontorp
Fonte Karl-Martin Skontorp