


















 51 / 84
51 / 84

FEBBRAIO 2015
FIELDBUS & NETWORKS
51
negli Slave Controller, che vengono finemente sincronizzati tra loro, viene
generato un riferimento temporale comune, la cui precisione è indipen-
dente dal jitter del master nell’inviare i frame. In questo modo, è pos-
sibile raggiungere un livello di sincronizzazione tra gli slave dell’ordine
delle centinaia di ns. In Ethercat, poi, i frame vengono instradati nella
rete senza alcun intervento software, perciò il ritardo di propagazione
è minimo e costante. Mediante la sincronizzazione dei clock distribuiti
negli slave, questo ritardo può essere calcolato molto semplicemente;
la contemporaneità del campionamento raggiunge la stessa precisione
della sincronizzazione tra i clock. Da un punto di vista puramente fisico,
Ethercat realizza una connessione punto-punto. Eventuali disturbi elettro-
magnetici non vengono trasmessi al nodo successivo e non si propagano
quindi all’intero sistema. Nonostante l’elevata velocità di trasmissione
Ethercat risulta perciò essere una tecnologia molto robusta. Qualora
si presenti un disturbo, l’errore viene individuato e localizzato in modo
affidabile grazie al controllo del CRC. Ciascun nodo effettua la verifica
su ogni frame, anche qualora quest’ultimo non contenga dati a esso
relativi. Oltretutto, ogni Ethercat Slave Controller mette a disposizione
fino a quattro porte. Da ciò risulta un’elevata flessibilità nella topologia,
anche senza utilizzare switch e hub. Nel sistema XTS i singoli moduli
risultano collegati tra di loro molto semplicemente con una topologia
‘daisy chain’. Infine, nonostante le elevate prestazioni e la precisione
di sincronizzazione, le specifiche imposte da Ethercat sull’hardware del
master sono ridotte: è sufficiente una porta di rete standard e non sono
richiesti chip dedicati o coprocessori di comunicazione, necessari invece
nel caso dei bus tradizionali o degli altri sistemi Ethernet industriale.
Questo consente di ridurre i costi e indica Ethercat come il sistema di
comunicazione ideale per la tecnologia XTS. Oltre a Ethercat come si-
stema di comunicazione, poi, per lo sviluppo della tecnologia XTS sono
state necessarie un’architettura per PC performante, in grado di fornire
la potenza di calcolo richiesta, e il relativo software (TwinCAT), capace
di mettere questa potenza di calcolo al servizio di un sistema di controllo
facile da configurare.
Un esempio di successo
Gli innovativi vantaggi di XTS offrono ai costruttori di macchine, soprat-
tutto nell’ambito del trasporto di materiali a elevata velocità, possibilità
completamente nuove. Con Ethercat è stato possibile garantire in modo
affidabile le specifiche di comunicazione particolarmente spinte richie-
ste dal sistema XTS di Beckhoff. Quest’ultimo rappresenta un esempio
di successo di una soluzione basata su Ethercat, per la quale i sistemi
bus tradizionali non sarebbero adeguati. Determinanti sono state le pre-
stazioni del bus: velocità, flessibilità e precisione unite ai ridotti costi
dell’hardware. Ethercat permette di superare le limitazioni attuali del
controllo assi e apre possibilità implementative completamente nuove.
Beckhoff -
www.beckhoff.deETG - Ethercat Technology Group -
www.ethercat.orgEthercat è una tecnologia Ethernet industriale che
si contraddistingue per: prestazioni elevate, costi
ridotti, topologia flessibile e semplicità di utilizzo.
Il sistema XTS è configurabile in modo semplice
e modulare, versatile e può essere impiegato nei
più diversi settori. Si tratta di una tecnologia dedi-
cata al trasporto di materiali a elevata velocità.
Come sistema meccatronico XTS incorpora tutte
le proprietà e i componenti necessari al funziona-
mento:
•
motore lineare modulare integrato con elettroni-
ca di potenza e feedback di posizione in un unico
dispositivo;
•
uno o più mover come parti mobili;
•
una guida meccanica;
•
un PC industriale con software di controllo
TwinCAT.
Geometrie con differenti lunghezze e raggi posso-
no essere realizzate attraverso la scelta e il nume-
ro dei componenti. Non sono necessari cablaggi
complessi e catene portacavi e il sistema di rile-
vamento della posizione è già integrato. Il siste-
ma consente un utilizzo ottimale del volume di
macchina, dato che i percorsi di andata e ritorno,
così come i tratti curvilinei si possono utilizzare
attivamente per il trasporto di materiale.
ETHERCAT E XTS
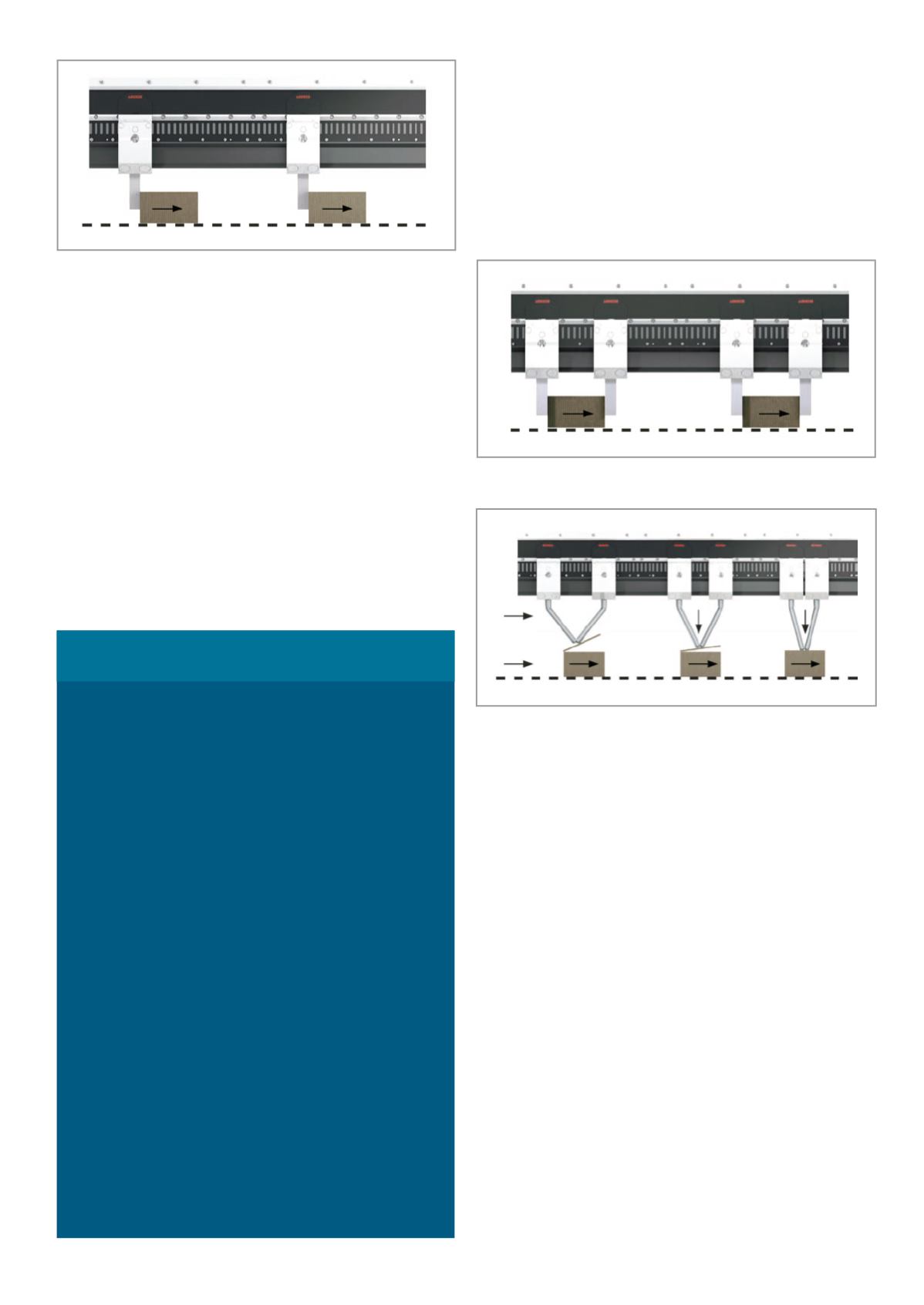
Cinematismo lineare per manipolare il prodotto: sollevare e chiudere
Il sistema consente di spingere il prodotto, adattare la distanza fra i
prodotti, diminuire e aumentare la velocità
Il sistema consente di agganciare il prodotto e muoverlo