


















 27 / 84
27 / 84

FEBBRAIO 2015
FIELDBUS & NETWORKS
27
von-Guericke-
University di
Magdeburgo,
per i test su
Ethernet/IP, e
ISW (Institute
for Control Engi-
neering of Ma-
chine Tools and
Manufacturing
Units) dell’Uni-
versità di Stoc-
carda, per i test su Sercos. I test di conformità autorizzati da Odva
forniscono all’industria, con garanzia di indipendenza dal produttore,
l’assicurazione di conformità alle specifiche Odva dei dispositivi testati
e della loro capacità di interoperare in installazioni multi-vendor. La
specifica CIP Safety definisce tre possibili implementazioni per la tec-
nologia CIP Safety: con reti Ethernet/IP, Devicenet e Sercos. “Il ricono-
scimento di ISW come TSP da parte di Odva è la naturale conseguenza
dalla collaborazione fra Odva e Sercos International su CIP Safety” ha
dichiarato Lutz. “La diffusione dei servizi di test di conformità da parte
di Odva per CIP Safety, per i quali sono stati autorizzati sia il TSP di
Ethernet/IP a Madgeburgo, sia il centro di test esistente per Sercos
International, offre a fornitori e utenti dei sistemi di controllo della
sicurezza funzionale di rete ulteriori possibilità per effettuare i test di
conformità in Germania” ha affermato Katherine Voss, presidente e
direttore esecutivo di Odva. Per ottenere la dichiarazione di conformità
da parte di Odva per la specifica CIP Safety un prodotto deve dimo-
strarsi conforme alle specifiche di rete e di CIP Safety, nonché a IEC
61508. Inizialmente, il test di conformità presso ISW sarà disponibile
per dispositivi slave Sercos e presso IAF per dispositivi Ethernet/IP. In
futuro, Odva ha preannunciato che questi TSP potranno fornire anche
altri servizi di test per CIP Safety in base alla crescita della domanda
dei servizi di supporto a CIP Safety in Europa.
Sercos International –
www.sercos.orgG
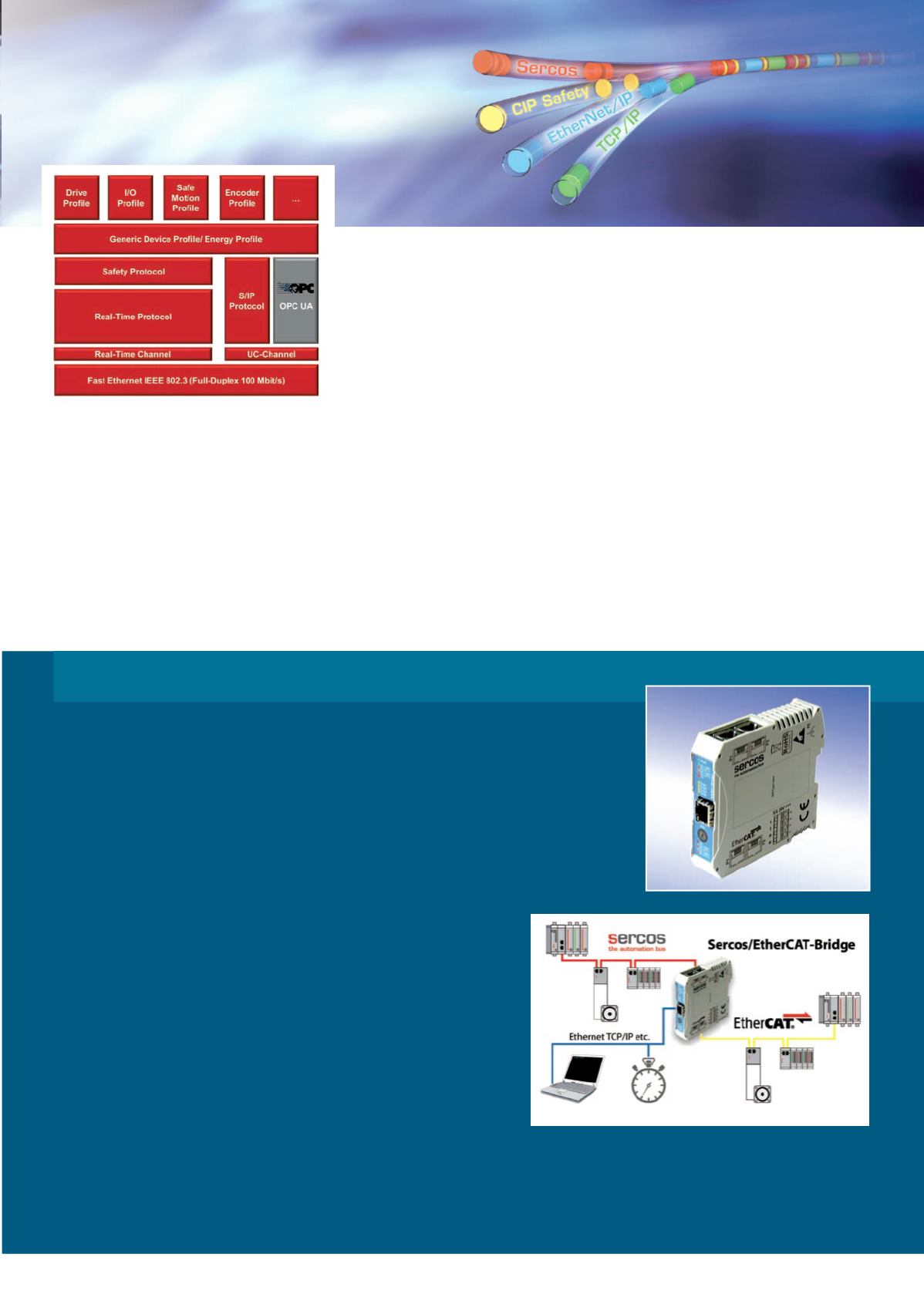
razie al Sercos/Ethercat-Bridge messo a punto da Cannon-Automata è pos-
sibile collegare master Sercos ed Ethercat per realizzare uno scambio dati
bidirezionale in realtime all’interno di strutture di comunicazione Ethernet
realtime eterogenee. Così, un master Sercos, per esempio in combinazione con la
libreria mxAutomation per CoDeSys, può comunicare direttamente con un robot
Kuka. Grazie alle elevate prestazioni offerte da questo tipo di comunicazione, il
master Sercos può inviare velocemente dei comandi di movimento al robot e rice-
vere e gestire i valori di feedback in tempo reale. Per la programmazione si posso-
no utilizzare i linguaggi IEC 61131. Il bridge Sercos/Ethercat si comporta su entram-
bi i bus come un normale dispositivo I/O. L’ampiezza dei dati real-
time è configurabile nel range compreso fra 32 e 2.048 byte, adatto
alle esigenze di molteplici applicazioni. Lo scambio dati in tempo
reale fra i due bus è supportato dall’hardware e viene eseguito in
un unico ciclo di comunicazione.
Oltre alle informazioni inerenti ai dati degli I/O specifici per appli-
cazione, anche le informazioni sullo stato della comunicazione e i
dati di diagnostica dei bus Sercos ed Ethercat vengono trasmessi
all’altra parte; in tal modo, i due master possono reagire rapida-
mente in base ai cambiamenti dello stato della comunicazione o in
caso di errori. Oltre al canale dati realtime, il dispositivo supporta
un canale bidirezionale per lo scambio di dati aciclico. Lato Sercos
questo meccanismo utilizza come elementi di consegna degli IDN
leggibili e scrivibili sul canale di servizio; lato Ethercat la mailbox è accessibile tramite oggetti CoE.
Il modulo, compatto, per montaggio su guida DIN, dispone sia per Sercos che per Ethercat di due porte RJ45;
un ulteriore connettore RJ45 frontale serve come porta standard Ethernet. Inoltre, il modulo può comunicare
con altri apparati connessi ai bus realtime utilizzando i rispettivi meccanismi.
DA SERCOS A ETHERCAT
La OPC UA Companion Specification permette
di accedere ai dati Sercos via OPC UA