MAGGIO 2014
FIELDBUS & NETWORKS
67
da considerare nella fase di scelta
del bus da utilizzare, in quanto ciò
influenza a sua volta le prestazioni
complessive dell’intera configura-
zione di automazione.
Ethercat e Profinet IRT
Il settore dell’automazione indu-
striale offre numerose tecnologie
di trasporto Ethernet, più o meno
recenti e supportate pressoché da
tutte le principali aziende del set-
tore. Tra queste Ethercat è un pro-
tocollo che offre elevate prestazioni
con caratteristiche di realtime e che
utilizza hardware standard, quindi
non necessita di soluzioni speciali.
Una tipica rete Ethercat è composta
di un master e numerosi slave (max
65.535) con una velocità di trasmis-
sione massima di 100 Mbps.
Uno dei profili più utilizzati in am-
bito automazione su base Ethercat
è DS402, derivante dal Canbus,
che permette ai controllori PLC
di assolvere a delicati compiti di
motion control centralizzato quali
l’interpolazione di assi, le camme
elettroniche e gli alberi elettrici.
Grazie alle sue caratteristiche di
funzionamento e alla topologia di
rete Ethercat permette uno scambio
dati molto rapido ed efficiente, con
tempi di ciclo compresi in 10/100 μs
circa a seconda dell’applicazione.
Un’altra soluzione di comunicazione
per il trasporto delle informazioni
dal campo su base Ethernet è rap-
presentata da Profinet IRT (Isochro-
nous Real Time). Si tratta di una parte del protocollo Profinet RT che, a
differenza della soluzione Ethercat, richiede l’impiego di un hardware
speciale sia per il master sia per lo slave. Una tipica rete Profinet è
composta da un master che è in grado di gestire un numero di slave
massimo pari a 255 unità per ciascuna sottorete. Anche in questo caso
la velocità massima di trasmissione è di 100 Mbps, ma i tempi di ciclo
minimi raggiungibili si aggirano su una soglia che si pone nei dintorni
dei 200 μs.
Il concetto di Motion Centric Automation
Sulla base della tecnologia di trasporto delle informazioni prima in-
dicata, Lenze ha messo a punto il nuovo concetto di ‘Motion Centric
Automation’: si tratta non solo di un valido sistema di automazione ca-
pace di rispondere alle esigenze di movimentazione, ma anche di uno
strumento avanzato di ingegnerizzazione. Ciò unitamene a una serie di
caratteristiche, quali, oltre alla velocità, il comportamento determini-
stico, indispensabile oggi a macchine e impianti che devono garantire
livelli di affidabilità e prestazioni sempre più elevati, per garantire qua-
lità e competitività dei prodotti realizzati. Senza dubbio Ethercat sta
guadagnando grande popolarità, poiché si dimostra tecnologicamente
adatto ad assolvere nel migliore dei modi le funzionalità di motion
control: è una tecnologia realtime aperta, molto collaudata, stabile
e a basso costo, con protocollo
open source deterministico e ad
alte prestazioni, che utilizza la rete
Ethernet in ambiente industriale. Il
concetto innovativo di Motion Cen-
tric Automation si basa principal-
mente su un’architettura hardware
in cui un controllore programma-
bile CPC3200 ad alte prestazioni
si occupa sia della gestione delle
funzioni di logica PLC, sia di tutte
le funzionalità centralizzate di
controllo del moto degli organi
meccanici della macchina (motori)
per mezzo di servoazionamenti.
Centralizzare tutte le funzionalità
di controllo permette, da un lato, di
semplificare e disporre di un unico
programma di controllo situato nel
controllore principale, dall’altro di
utilizzare un hardware standard di
tipo PC-based, capace di suppor-
tare funzioni tipiche quali FTP ser-
ver, web server e VNC server, per
esempio per la remotazione della
grafica in tele-assistenza. Non ul-
timo si consideri la disponibilità
di porte Ethernet già a bordo, utili
sia per la programmazione sia per
lo scambio dei dati verso infra-
strutture di livello superiore, quali
sistemi Scada o server aziendali.
Dalla piramide
a un sistema centrale
e compatto
Il concetto Motion Centric Automa-
tion di Lenze permette di trasfor-
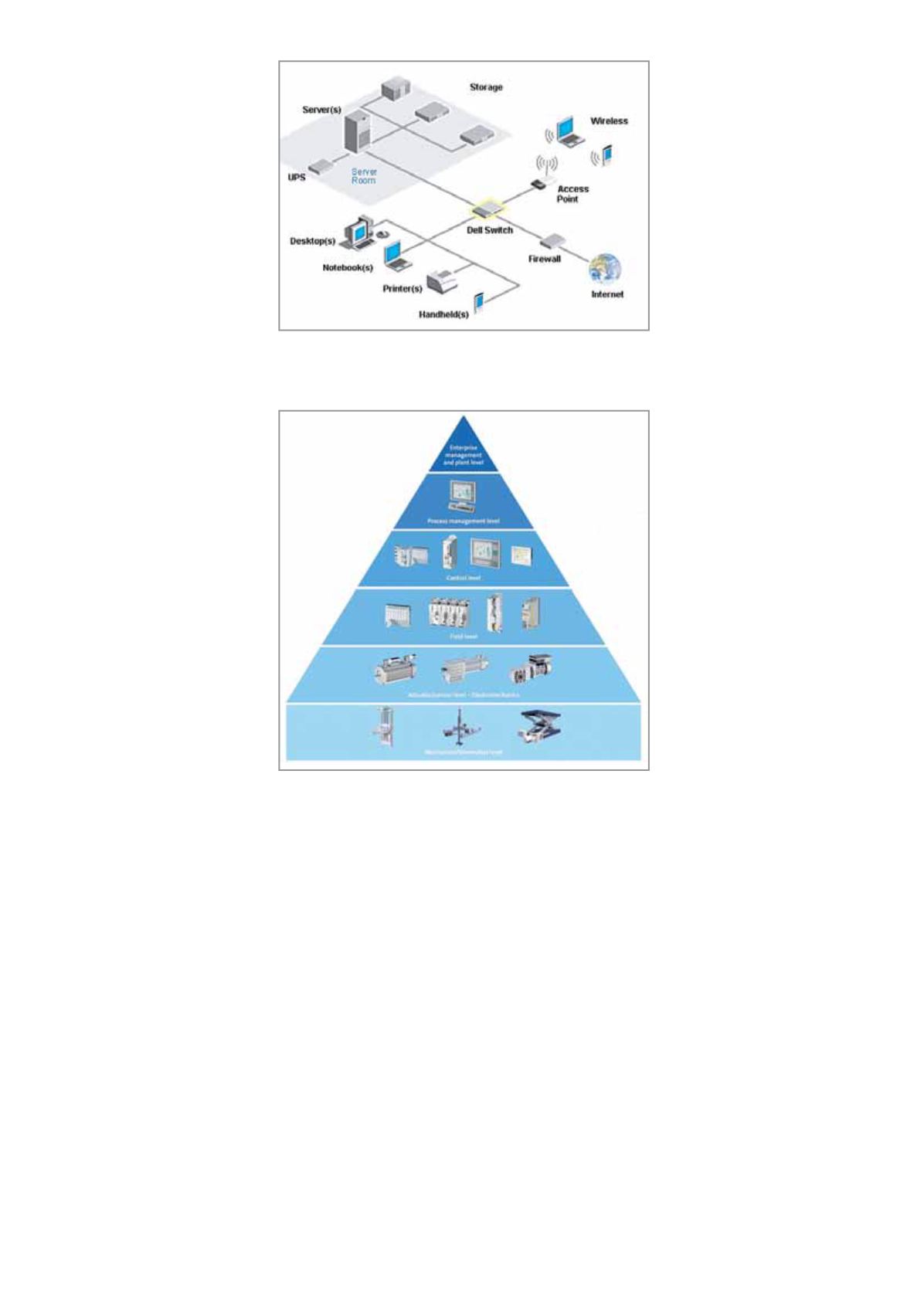
mare la struttura piramidale tipica
dell’automazione in un sistema centrale e compatto, che crea sinergie
fra i dispositivi di controllo e di alto livello fino agli attuatori a livello di
campo. Grazie a questa architettura l’intelligenza del controllo è cen-
tralizzata, rendendo semplici i dispositivi di controllo della potenza,
quali i servoazionamenti serie i700, che in questo modo non hanno più
un programma di controllo locale. Ciò rappresenta un vantaggio per le
aziende costruttrici di macchine complesse perché, oltre a semplificare
la programmazione dell’intera configurazione, è possibile effettuare
le operazioni di manutenzione dei programmi attraverso la tele-assi-
stenza remota: è sufficiente stabilire una connessione Internet verso
il controllore centrale per monitorare e accedere a tutte le funzioni
di controllo del motion e alle grafiche dell’intero sistema. Inoltre, il
caricamento dei parametri del motore può essere gestito direttamente
dal controllore centrale, che può quindi inviare al servoazionamento i
dati fisici del servomotore da controllare, anche in caso di sostituzione
del drive, minimizzando così gli interventi di assistenza tecnica nor-
malmente necessari. Molti dei controllori programmabili pensati per
il concetto Motion Centric Automation Lenze svolgono anche funzioni
di gateway fra la rete Ethernet e la rete Ethercat, al fine di consentire
l’accesso ai servoazionamenti direttamente in tele-assistenza.
Lenze -
Struttura piramidale della catena di automazione
Tipico esempio di una topologia di rete Ethernet: una
tendenza in atto, anche nel settore automazione, è preferire
soluzioni di trasporto mediante soluzioni su base Ethernet


