

















 54 / 100
54 / 100

approfondimenti
Luglio/Agosto 2015
n
Automazione e Strumentazione
54
robotica
la
presenza
(e la distanza)
degli operatori
dallo
spazio tridimensionale occupato dalle traiettorie
del robot stesso.
L’azione combinata di questi controlli fa sì che
la macchina riduca a zero i fermi di produzione.
Come? Conoscendo in ogni istante posizione
della macchina, le traiettorie che sta compiendo
nonché, integrando le informazioni dei sensori di
sicurezza, la posizione delle persone in funzione
degli spazi stessi delle traiettorie e del robot, si
assisterà ad un
rallentamento dell’azione del
robot
all’approssimarsi dell’operatore, ma si
avrà un
fermo
esclusivamente se questi sarà real-
mente nell’area di lavoro. All’allontanarsi, infine,
dell’operatore il robot tornerà a muoversi alla
velocità corretta, riprendendo a lavorare
a pieno
ritmo
.
I vantaggi RoboSafe paiono subito evidenti: da
un lato si ha, come appena ricordato, la riduzione
fino a (pressoché) zero dei fermi produzione, con
i relativi vantaggi in termini di
resa, efficienza e
produttività
; dall’altro, come vedremo, le celle
ospitanti le macchine possono essere progettate
con minor spazio di occupazione. Non occorre
più, infatti, proteggere tutta l’area potenziale
di lavoro del robot, ma solo quella, volta per
volta, effettivamente interessata dai movimenti
della macchina. Dato che ad una riduzione della
dimensione della cella corrisponde la
riduzione
di layout
occupato, anche questa opportunità di
traduce in un risparmio economico.
Robot che “collaborano” con l’uomo
Se ancora non è possibile parlare di collabo-
razione diretta, e in totale sicurezza, tra uomo
e robot, sicuramente la soluzione RoboSafe di
Comau rappresenta un
passo avanti
di notevole
importanza. Grazie agli ultimi sviluppi che por-
tano ad un controllo puntuale dello spazio car-
tesiano, gli operatori possono muoversi in totale
sicurezza in un’area di lavoro attigua al robot
senza indurre fermi macchina.
Il funzionamento (almeno spiegato) è semplice:
con il
controllo dello spazio cartesiano
, ovvero
dello spazio tridimensionale occupato dal robot
e dai suoi assi, l’area della cella viene suddi-
visa in porzioni con diversi
gradi di criticità
.
All’interno di ciascuna porzione, e in maniera
direttamente proporzionale proprio alla criticità
corrispondente, il robot assumerà comportamenti
differenti (rallentamento o ripresa, stop, azione
normale, accelerazione, ecc.) in funzione della
tipologia di violazione commessa dall’operatore
in ciascuna delle porzioni individuate. Ciò signi-
fica, come anticipato, che il robot può lavorare
in alcune aree della cella, mentre l’operatore può
svolgere altre attività in un’altra porzione, oppure
occuparsi di attività di manutenzione alla cella
stessa o ad aree di lavoro attigue senza, appunto,
causare un fermo produzione.
Comau Racer 7-1.4
robot lanciato nel 2014
e pluripremiato a livello
internazionale proposto
al mercato in modalità
RoboSafe
Il software del controllo di quinta generazione, C5G, in
versione standard o compatta offre interfacce di sicurezza
per un controllo in modalità RoboSafe.
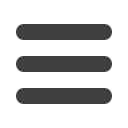
Una scomposizione dei movimenti
del robot utile a calibrare le
porzioni di aree di lavoro da
monitorare.