approfondimenti
55
Viterbi Complex Unit (VCU II)
La VCU II viene integrata nella CPU per ela-
borare
funzioni matematiche complesse
in
maniera efficiente. Questa unità accelera le
prestazioni degli algoritmi di comunicazione
fino a 10 volte e offre margini per la crescita
futura del sistema e velocità di bit superiori;
o, in alternativa, consente il funzionamento
dei dispositivi a velocità inferiori per ridurre i
costi e i consumi energetici dei sistemi. Negli
azionamenti industriali, la VCU II può miglio-
rare la previsione di guasti al motore tramite
l’analisi delle vibrazioni sui motori.
Acceleratore di controllo in tempo reale (CLA)
Le MCU F2837xD integrano due CLA in
tempo reale che consentono una ripartizione
intelligente delle attività di controllo critiche in
un sistema di azionamenti. I CLA sono
proces-
sori a virgola mobile
indipendenti con un’ar-
chitettura dedicata a bassa latenza simile a una
CPU e accesso diretto alle periferiche di con-
trollo. I CLA possono essere utilizzati in vario
modo per sgravare la CPU da attività intensive
di elaborazione di segnale
υ
figura 1
.
L’acceleratore può far parte del front-end di
un convertitore analogico-digitale (ADC) e
pre-elaborare i segnali in ingresso per filtrare
il rumore e immagazzinare i dati nella propria
RAM. In questo modo la CPU viene coinvolta
solo quando è disponibile un intero blocco
di dati pre-elaborati. Il CLA può effettuare
anche l’analisi del segnale su forme d’onda di
corrente in ingresso, la pre-elaborazione del
feedback, il controllo del feed-forward, l’ana-
lisi di segnali speciali, l’elaborazione di pac-
chetti e altro ancora.
Negli azionamenti industriali, una CPU + CLA
può implementare funzionalità sul lato di con-
trollo, ad es. l’anello di controllo della coppia,
mentre l’altra CPU + CLA implementa la parte
applicativa del sistema, ad esempio rileva-
mento di velocità e posizione, calcolo di tra-
iettorie e comparazione dei profili di moto. La
suddivisione del sistema di azionamento indu-
striale in porzioni di controllo e applicazione
assegnate alle due CPU consente una chiara
ripartizione che semplifica la progettazione.
Questo approccio contribuisce anche a bilan-
ciare le attività di controllo in tempo reale e di
applicazione
υ
figura 2
.
Bassa latenza e architettura
deterministica
Il determinismo è essenziale nelle applicazioni
di controllo. Con l’architettura di memoria non
condivisa (loosely coupled) tipica di un proces-
sore basato su cache, è difficile determinare le
peggiori condizioni (worst-case) di capacità di
risposta che determinano perdite imprevedibili
della cache. Tipicamente i progettisti fanno
affidamento sulla profilazione dell’esecuzione
in tempo reale del sistema per verificare le con-
dizioni di funzionamento peggiori. Eventuali
modifiche al codice del sistema possono richie-
dere che la profilazione venga ripetuta più
volte per verificare che i limiti deterministici
del sistema non siano stati superati.
L’architettura della MCU Delfino F2837xD
è costruita su una
base deterministica
. Gra-
zie alla sua architettura a memoria condivisa
(tightly coupled), non serve una cache e si eli-
minano i relativi ritardi dovuti a perdite della
cache. Tutte le transazioni di memoria verso
la RAM statica (SRAM), la memoria flash e le
periferiche sono studiate per essere compatibili
con la struttura e i cicli di bus finiti, offrendo
una capacità deterministica. La doppia perife-
rica di memoria ad accesso diretto a sei canali
aumenta l’efficienza di gestione della memoria,
assicurando che i dati siano sempre disponibili
quando la CPU o gli acceleratori ne hanno biso-
gno. Questo determinismo si estende anche alle
periferiche della MCU. La latenza dell’ADC è
nota, così come il tempo necessario alla CPU
per aggiornare i moduli PWM (modulazione di
larghezza d’impulso). Non è necessario sapere
Figura 1 - Il CLA può aumentare la
frequenza o il numero degli anelli
di controllo, sgravando la C28x
in modo che possa svolgere più
attività di controllo in background
e attività di sistema
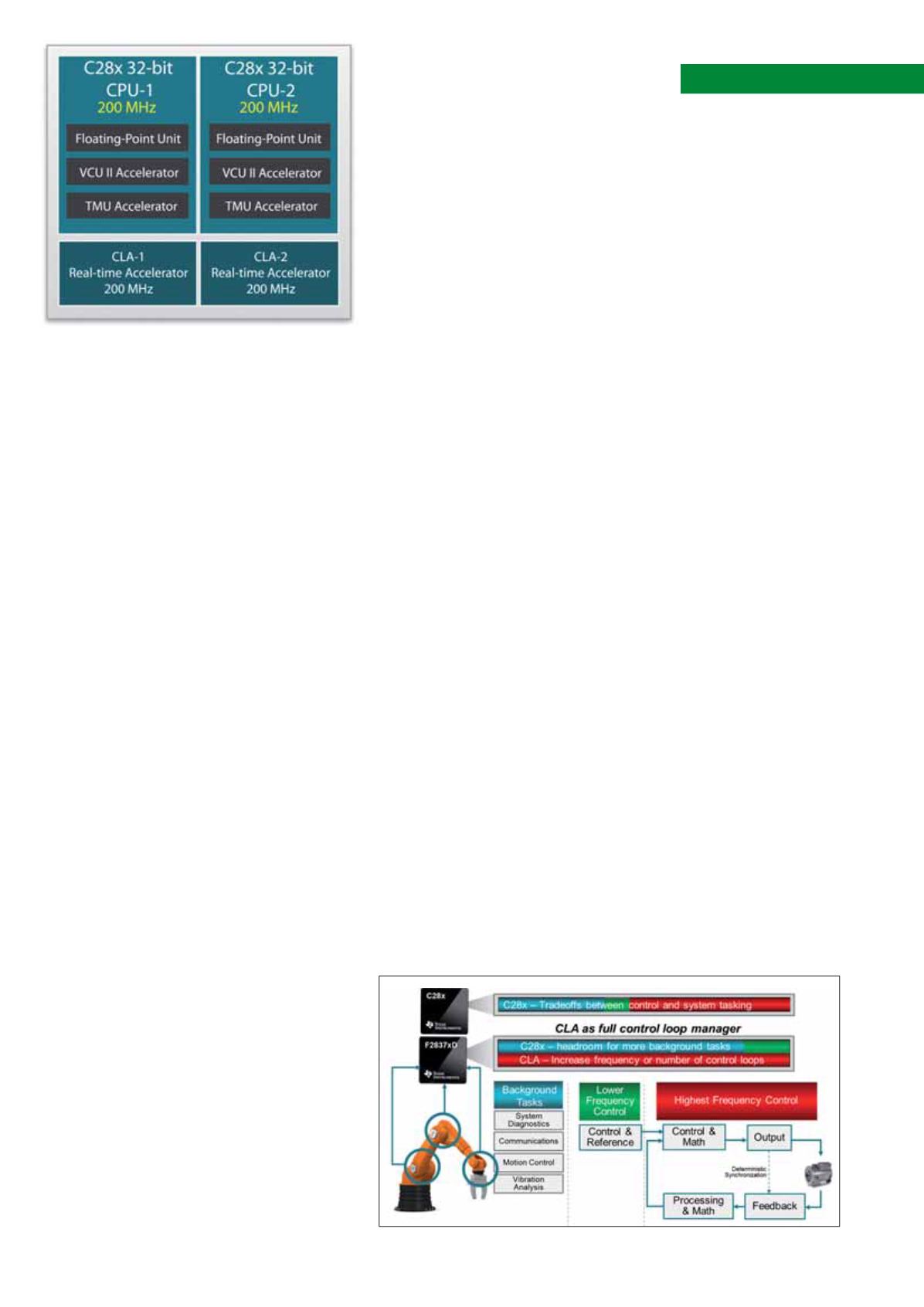
Figura 2 - Dettaglio dei core e degli acceleratori della CPU C28x.
Automazione e Strumentazione
■
Maggio 2014
CONTROLLO


