

















 37 / 100
37 / 100

Automazione e Strumentazione
Aprile 2016
MISURA
approfondimenti
37
nati ad una frequenza di 20 kHz, rimanendo
pertanto silenziosi e raggiungendo velocità
fino a 10 mm/s.
L’effetto stick-slip è responsabile
del movimento
Il principio di funzionamento dei sistemi basati
sui piezo Inerzia Drives è molto semplice da
capire (
υ
figura 2
): essi utilizzano l’
effetto
stick-slip
per fare un passo con incrementi di
pochi micrometri. L’attuatore si espande len-
tamente e muove un carrello. Nella seconda
parte del ciclo di movimento l’attuatore si con-
trae così rapidamente che slitta lungo la parte
spostata, la quale non può seguire questo movi-
mento a causa della sua inerzia, rimanendo per-
tanto nella stessa posizione. Così come per le
unità piezo stepping, le corse sono teoricamente
illimitate, inoltre il principio di funzionamento
necessita di un solo attuatore per asse, semplifi-
cando la configurazione e riducendo i costi.
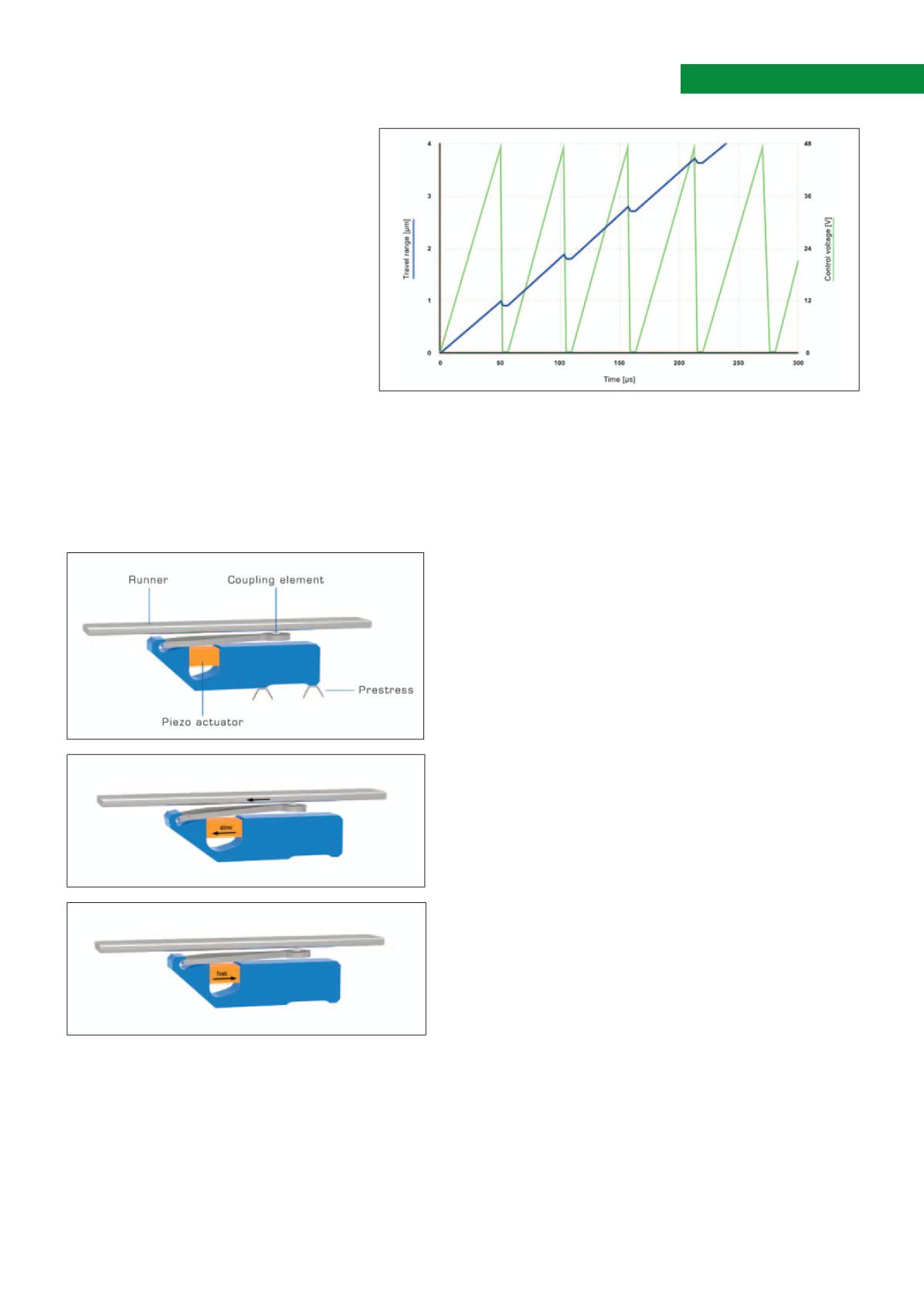
Fondamentalmente il controllo elettrico dei
sistemi basati sui piezo Inerzia Drives è sem-
plice: il segnale di uscita assomiglia a un ‘dente
di sega’ (
υ
figura 3
). L’attuatore viene azio-
nato ciclicamente - si espande lentamente e si
contrae velocemente in una direzione di movi-
mento, viceversa per l’altra direzione
di movimento. Questo rappresenta
‘il
cuore del movimento’
. Tuttavia, una
buona dose di know-how è necessa-
ria per abbinare il funzionamento al
sistema meccanico in modo che sia il
movimento lento e non quello veloce
ad alimentare il carrello. Nella fase di
‘stick’ l’attuatore si comporta come
qualsiasi altro attuatore piezoelettrico
e, in combinazione con un encoder
adeguato, può raggiungere una risolu-
zione di posizione di un nanometro,
se non meno. Essendo i sistemi basati
su dispositivi piezo inerziali auto-
bloccanti, in fase di riposo non consu-
mano energia. Nel caso di
dispositivi
metrologici
destinati a un uso mobile,
questo sistema permette di ridurre
il consumo della batteria. Esempi di
questo tipo li troviamo anche nella
regolazione degli
obbiettivi in dispo-
sitivi di misurazione ottici
o durante
l’iniezione di farmaci nei pazienti per
mezzo di pompe.
Dalla slitta lineare
al sistema a sei assi
Il principio di funzionamento offre
anche grande flessibilità nella pro-
gettazione del sistema di posiziona-
mento; esso consente infatti una facile
configurazione dell’attuatore e il controllo dello
stesso.
Il cuore del movimento, l’unità basata
su piezo, viene implementato come modulo
.
Questo rende possibile la realizzazione di lunghe
Figura 2 - Un attuatore piezoelettrico si espande e muove un carrello.
Nella seconda parte del ciclo del movimento l’attuatore si contrae così
rapidamente che slitta lungo la parte spostata, la quale non può seguire
questo movimento a causa dell’inerzia (Immagine: PI)
Figura 3 - Il controllo elettrico [V] delle unità di inerzia
su base piezoelettrica utilizza un segnale di uscita che
assomiglia a un ‘dente di sega’ (Immagine: PI)