

















 113 / 126
113 / 126

MARZO 2016
AUTOMAZIONE OGGI 388
111
sé, la configurazione delle Skid-Shoes viene analizzata e attuata in
base all’applicazione da fare e all’oggetto da sollevare;
•
alto numero di oggetti animati da rappresentare
: nella sua mas-
sima configurazione il sistema doveva essere in grado di gestire
fino a 100 Skid-Shoes, dove ognuna di esse è di fatto una mac-
china indipendente composta da numerosi attuatori, sensori,
motori, cilindri ecc., per cui il numero di oggetti animati da rap-
presentare era molto grande;
•
velocità di interpretazione delle informazioni
: è necessario co-
munque garantire il colpo d’occhio su quanto sta accadendo data
la criticità delle operazioni;
•
archiviazione
: durante tutte le operazioni è necessario regi-
strare tutto ciò che accade (eventi, allarmi, dati di processo) e sto-
ricizzarli su un archivio che registra le operazioni cantieristiche
effettuate. Il numero di questi eventi è notevole data la grande
quantità di sensori e attuatori.
Architettura del sistema
L’architettura del sistema era composta da un PC workstation
dual-monitor con il software di supervisione Scada Movicon
versione 11.4, con PLC Bosch XLC. Ogni Skid-Shoes era dotata
di un proprio PLC e Movicon 11, l’unico sistema di supervisione
installato, che doveva colloquiare con i PLC di ogni singola Skid-
Shoes e quindi doveva gestire fino a un massimo di 100 PLC. Dal
momento che il carico diventava notevole, Progea ha creato l’ap-
posito driver Bosch per sopperire a questa necessità. Il driver di
nuova comunicazione è riuscito quindi a far fronte egregiamente
alla complessa architettura.
Le soluzioni adottate
Per affrontare tutte le difficoltà che l’analisi ha fatto emergere, Eureka
System ha sviluppato un Wizard di configurazione. Questo partiva
dall’import del disegno CAD in formato .dwg dell’oggetto da traspor-
tare, in questo caso la nave da crociera, e proseguiva con l’input di
una serie di parametri per concludersi con l’inserimento sul layout
degli oggetti Skid-Shoes, prelevandoli dal Repository tramite tec-
nica di drag&drop. Tutto questo a runtime, quindi fattibile dall’ope-
ratore e non in fase di sviluppo come solitamene avviene. In questo
modo, si è riusciti a ovviare al problema del livello di configurabilità
del sistema ed è stato possibile avere il controllo visivo realtime di
un grande numero di apparecchiature, disposte in un’area di vaste
dimensioni. D’altra parte, per l’alto numero di oggetti da riprodurre
e la velocità di interpretazione delle informazioni, Eureka System ha
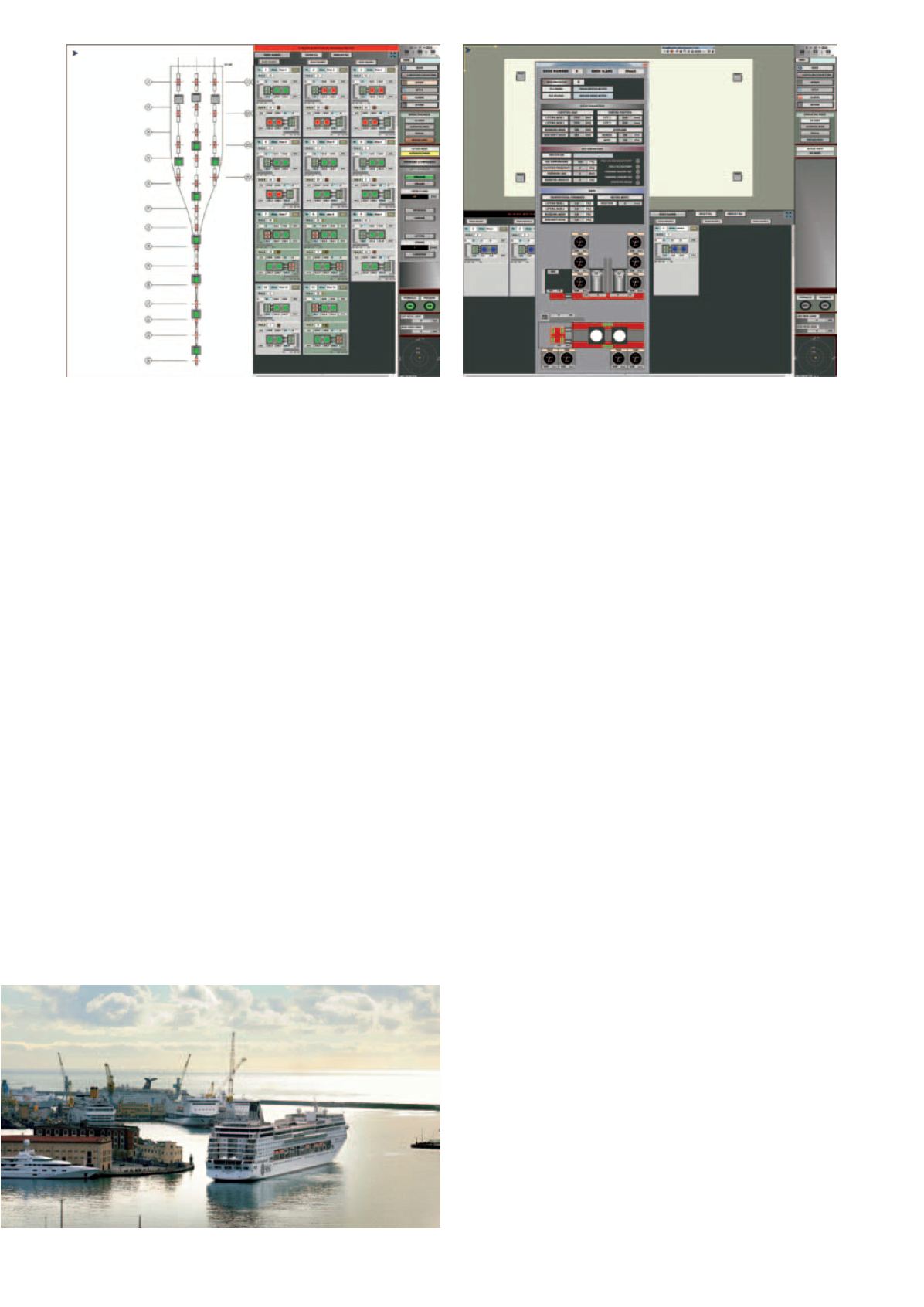
scelto di rappresentare gli stati del sistema su tre livelli di zoom diffe-
renti, con diversi gradi di dettaglio. In caso di allarme, per esempio, la
Skid-Shoes rappresentata a livello 1 diventa rossa distinguendosi da
tutte le altre, mentre a livello 3 si vedrà rosso solo il sensore specifico.
La potenza del motore grafico di Movicon, un utilizzo attento delle
tecniche di rappresentazione degli oggetti e lo studio di Visual Design
hanno permesso di risolvere il problema in maniera efficace. Per l’ar-
chiviazione dei dati Eureka System ha prestato particolare attenzione
alla strutturazione del databaseMS-SQL abbinata a una gestione degli
eventi bilanciata tra PLC e HMI, che ha permesso di storicizzare tutto
ciò che il cliente richiedeva, soddisfacendo anche l’esigenza di analisi
post-operativa di tutte le operazioni effettuate in una sorta di play-
back. In particolare, per quanto riguarda la parte grafica, le tecniche di
rappresentazione sono state estremamente curate per renderlemag-
giormente intuitive. È stato svolto anche uno studio approfondito a
livello di Visual Design per coniugare al meglio estetica e funzionalità.
Alcuni valori di processo sono stati rappresentati sia in forma nume-
rica sia graficamente e, in alcuni casi, nell’esigenza di andare oltre alle
solite tecniche quali bar-graf, gauge, trend, sono stati creati nuovi tipi
di rappresentazione, sfruttando al massimo la flessibilità e il potente
motore grafico di Movicon 11. Le operazioni più critiche per dimen-
sioni e peso della nave, da svolgere in ambientemarino, hanno richie-
sto grande affidabilità, facilità d’uso, grafica e data logging dettagliati
di tutte le operazioni e un’efficacia a colpo d’occhio per effettuare una
diagnosi veloce e approfondita in caso di problematiche.
•
Eureka System -
www.eurekasystem.itProgea -
www.progea.comLa potenza del motore grafico di Movicon ha consentito un
utilizzo attento delle tecniche di rappresentazione degli oggetti
La rappresentazione è dettagliata per consentire una diagnosi
veloce e approfondita in caso di problemi