
















 94 / 142
94 / 142

GENNAIOFEBBRAIO 2016
AUTOMAZIONE OGGI 387
94
AO
TAVOLA ROTONDA
tamenti complessi, in risposta alla complessità dell’ambiente in cui
devono operare, se tale ambiente è quello naturale per gli esseri
umani, quello della vita quotidiana. Altrettanto complessa è l’intera-
zione con gli esseri umani stessi. Allo stesso tempo, unmercato della
robotica di servizio, pur previsto da molti, non si è
ancoramaterializzato, probabilmente anche a causa
di una serie di fattori non strettamente tecnologici,
legati all’accettabilità dei robot in senso lato”.
Metta:
“Al momento, almeno in alcuni settori della
robotica, manca la cosiddetta ‘killer application’;
manca perché il mercato non è chiaro e anche
perché in alcuni casi non sappiamo realizzare la
tecnologia necessaria. Un esempio su tutti: l’intelli-
genza dei robot è ancora troppo primitiva, il robot
che opera in maniera sicura è troppo lento… Se poi aggiungiamo
il costo elevato, mi pare che non siamo proprio in condizione di ar-
rivare al mercato (escludiamo da questo discorso i robot industriali
tradizionali). Per fare il salto di qualità servono finanziamenti foca-
lizzati che migliorino l’intelligenza artificiale e l’hardware e possano
in breve tempo portare a risultati consistenti. Il robot, in sostanza,
deve raggiungere il 100%delle prestazioni qualunque sia il compito
considerato. I sistemi di visione dovranno raggiungere queste pre-
stazioni, i sistemi di controllo non potranno fallire, la sicurezza dovrà
essere garantita. Per farlo non esiste altra strada se non investire in
ricerca, non a pioggia ma sui componenti necessari per arrivare a
questi risultati (il 100%)”.
A.O.:
La robotica per l’industria si sta indirizzando ai robot collabora-
tivi, qual è la sua idea inmerito?
Metta:
“Come dicevo: l’industria va nella direzione del robot col-
laborativo e parzialmente intelligente. Un robot che possa essere
programmato facilmente (senza lo specialista) e che sostituisca
l’uomo nei compiti ripetitivi e pesanti, senza richiedere mesi per
essere riconfigurato quando dovesse cambiare il compito da svol-
gere. A più lungo termine le applicazioni sarannomolteplici. Il robot
collaborativo diventerà autonomo a tutti gli effetti e sarà infermiere,
badante, autista, cameriere… Non sarà però ancora un robot che
può imparare tutto senza l’aiuto dell’uomo. Il robot richiederà una
fase di allenamento (fatto dall’uomo) e la prepara-
zione di software adatti al compito da svolgere (le
‘app’ della robotica). Questo sarà probabilmente
un mercato che richiederà delle figure professio-
nali molto qualificate. L’utente finale sarà anche
l’insegnante del robot e lo configurerà per svol-
gere il suo compito nell’ambiente selezionato (non
tutte le case sono uguali, come non lo sono tutti gli
ospedali…)”.
Laschi:
“Sia in ambito industriale sia nei servizi i
robot giocheranno un ruolo importante, che non è scindibile da
quellodelle persone. Anzi, lo scenario ideale sarà quellodi assistenza
alle persone, sia nella vita privata sia in quella professionale. I robot
potranno quindi essere una risposta al bisogno di assistenza della
popolazione che invecchia, ma potranno anche essere una risposta
alle esigenze della produzione industriale, non più sostituendo ma
assistendo i lavoratori e favorendo un mercato del lavoro sano, nei
Paesi industrializzati, contrastando lo sfruttamento del lavoro nei
Paesi in via di sviluppo”.
A.O.:
Quali nuove prospettive apre l’Internet delle Cose applicato
all’ambito dei robot?
Laschi:
“Internet ha aperto scenari impensabili fino a pochi anni fa,
pur rimanendo nell’ambito della trasmissione di dati e informazioni.
La robotica può aggiungere alla rete la fisicità, la possibilità di agire,
di compiere azioni, completando questo scenario verso possibilità
e opportunità sempre maggiori”.
Metta:
“Il robot sarà un altro pezzetto dell’Internet delle Cose. L’in-
telligenza del robot, i suoi sensori e attuatori non possono essere
ancora completamente inclusi nel robot (come entità separata dal
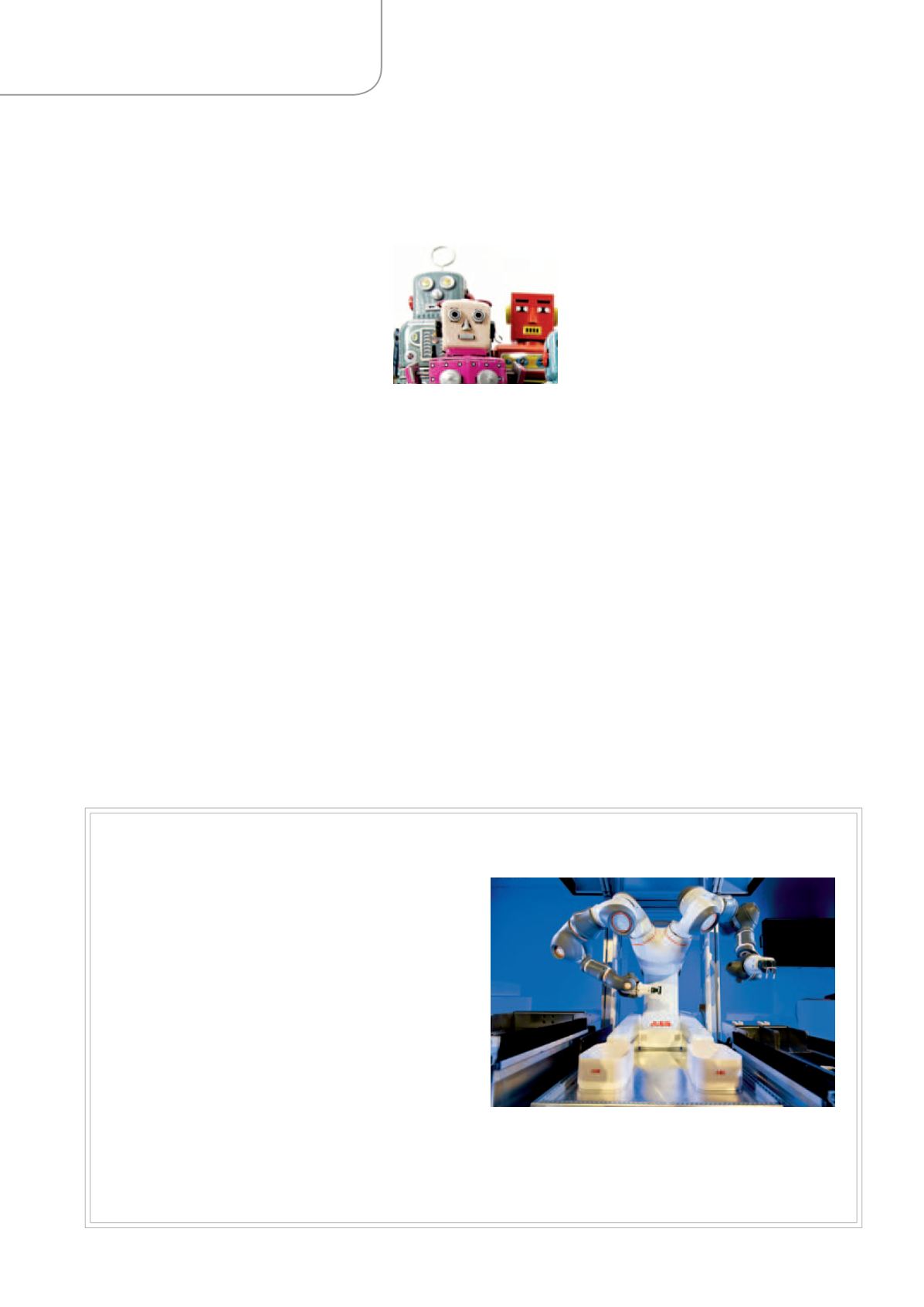
Primo esempio di robot davvero collaborativo, YuMi di ABB
pesa solo 38 kg ed è dotato di due bracci, ‘vista e tatto’, pensato
per una nuova era dell’automazione, in cui gli esseri umani e i
robot eseguono congiuntamente e in totale sicurezza le stesse
operazioni. La parola YuMi è infatti l’abbreviazione di ‘You and
Me’, a sottolineare la collaborazione tra macchina e uomo. La
sicurezza delle persone che interagiscono con YuMi è garantita
dal doppio braccio con imbottitura morbida del robot, a cui
si abbina un’innovativa tecnologia con sensori di forza che
ne aumentano la capacità di percepire presenze intorno a sé,
modificando il proprio modo di operare di conseguenza. I di-
spositivi di sicurezza sono integrati nella funzionalità del robot
stesso, in modo che possa operare senza recinzioni di sicurezza.
YuMi ha la capacità di manipolare qualsiasi oggetto, dai delicati
elementi di precisione di un orologio meccanico da polso, ai
componenti di telefoni cellulari, tablet e computer; è inoltre in
grado di svolgere operazioni con precisione e accuratezza. A
Expo 2015 YuMi ha operato al banco della frutta del ‘Supermer-
cato del Futuro’ nel Future Food District, confezionando mele
in contenitori di materiale ecologico e collocandole in un’area
self-service direttamente a disposizione dei visitatori.
YuMi: la collaborazione secondo ABB