


















 125 / 134
125 / 134

NOVEMBRE-DICEMBRE 2015
AUTOMAZIONE OGGI 386
125
terazione sicura fra uomo e
robot. Per garantire tale sicu-
rezza inizialmente l’unico ap-
proccio possibile era quello di
tenere i robot segregati dagli
uomini; con il tempo gli svi-
luppi tecnologici di hardware
e software hanno permesso di
sviluppare strategie efficienti
basate su una reale interazione
uomo-robot. Benché l’HRI si
sia sviluppata maggiormente
per applicazioni robotiche
di servizio, è indubbio che il
suo potenziale per applica-
zioni industriali sia enorme,
in particolare
per quanto
riguarda la
possibilità di
incrementare
flessibilità ed
efficienza dei processi produttivi. Un approc-
cio che si sposa bene, inoltre, con il concetto di
Smart Factory e Industria 4.0, cioè con lo sce-
nario di una fabbrica intelligente in cui tutte
le macchine (e non solo) siano connesse fra
di loro. Lo sviluppo di robot interagenti con
l’uomo è di particolare interesse anche per le
PMI, che sino a ora non hanno potuto intro-
durre unità robotiche nel proprio layout di
fabbrica a causa dei problemi di spazio dovuti
alla necessità di separare i robot dagli operatori
umani. Rispetto alla realtà dei robot di servizio,
che operano in ambienti civili, il livello di intel-
ligenza richiesto ai robot industriali sarà infe-
riore, perché l’ambiente di fabbrica è comunque abbastanza
statico (o, per dirlo con una terminologia robotica, strutturato)
rispetto ad ambienti esterni. Vi sono due strategie di intera-
zione uomo-macchina che si stanno diffondendo nella fabbrica
intelligente, chiamate speed and separation monitoring (SSM)
e power and force limiting (PFL). La prima è una tecnica che
utilizza sensori esterni per rilevare la presenza di esseri umani
all’interno dell’area di lavoro del robot, con il software di con-
trollo che utilizza questa informazione per evitare il contatto. Si
tratta di una strategia articolata in più livelli: se si rileva la pre-
senza umana in una zona più lontana, il robot semplicemente
rallenta; se invece la presenza umana è più ravvicinata, il robot
si ferma completamente.
Allo stesso modo, quando l’operatore umano comincia ad allon-
tanarsi, il robot dapprima riprende a muoversi lentamente, per
poi riportarsi a velocità normale non appena l’umano è comple-
tamente uscito dall’area di lavoro.
La PFL invece utilizza dati sensoriali per rendere sicuro il con-
tatto fra uomo e robot. Anche in questo caso, la strategia è
molto semplice: i valori di forza e coppia erogati dai motori del
robot vengono abbassati sotto un’opportuna soglia di sicurezza
quando viene rilevata la presenza umana. Sono tuttora in corso
studi in vari laboratori di ricerca per definire in maniera precisa
quali sono tali livelli di sicurezza. Si tratta di strategie abbastanza
semplici, che possiamo definire reattive. La vera sfida per l’auto-
mazione industriale sarà piuttosto quella di adoperare strategie
attive, cioè riuscire a utilizzare i robot come veri e propri ope-
ratori, che assistano e incrementino la forza lavoro all’interno
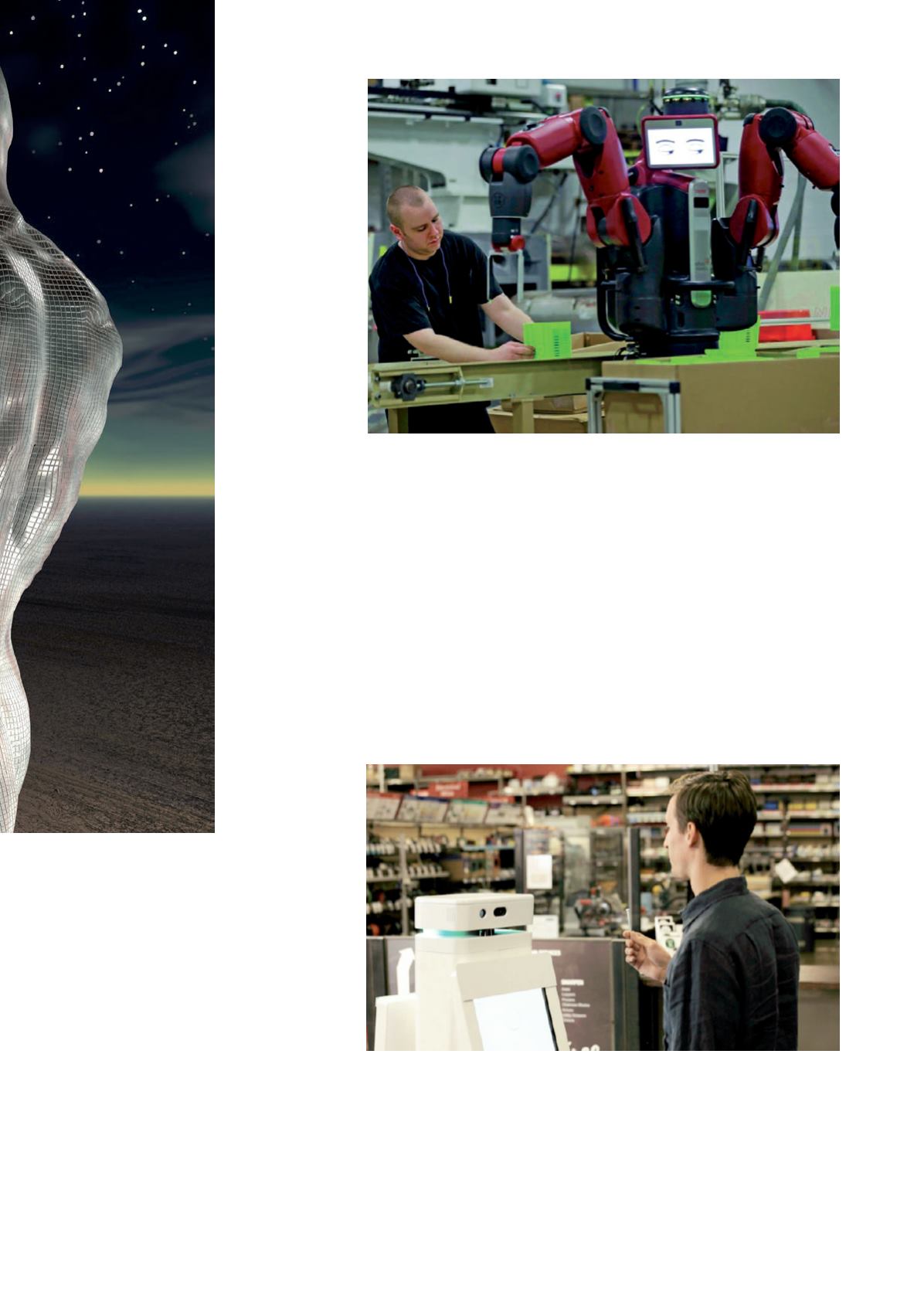
Figura 1 - Baxter,
robot-operaio
che può
lavorare alla
catena di
montaggio a
fianco degli
operai
Figura 2 - Il robot-commesso Oshbot può rispondere alle domande dei clienti
sui prodotti desiderati