SETTEMBRE 2013
AUTOMAZIONE OGGI 366
71
manovella è il contributo di
due generatori di traiettoria
(figura 5): il primo blocco cu-
stom FB_BiellaManovellaRac
genera il movimento della
manovella nel tratto di linea-
rizzazione, il secondo blocco
di libreria (Cam_Link) genera
il profilo di recupero e rac-
cordo. Infine Il functionblock
di libreriaAxu_CustomTrjMa-
ster genera la posizione, la
velocità e l’accelerazione
della manovella in relazione
alla velocità e accelerazione
di un asse master. Infine, il
grafico (figura 6) mostra l’an-
damento della velocità della
manovella (linea rossa), della
velocità del piede della biella (linea verde) dove si nota il tratto a
velocità costante e l’accelerazione della manovella (linea grigia).
La possibilità per l’utente di costruirsi proprie librerie, permette
di ridurre notevolmente i tempi di sviluppo degli applicativi soft-
ware. L’ambiente di sviluppo denominato 4Control, lavora in
modo particolarmente efficiente in quanto traduce i programmi
scritti nei vari linguaggi IEC61131 direttamente nel codice mac-
china del processore PowerPC del controllore. Il master control-
ler utilizzato in applicazioni di questo tipo appartiene alla linea
FCT che si compone attualmente di tre modelli, FCT200, FCT241
e FCT300. Il modello più performante, FCT300, è dotato, oltre al
bus di campo Canopen comune ai fratelli minori, anche di inter-
faccia Ethercat e ha caratteristiche di performance e risorse che
lo pongono nella fascia alta del mercato di riferimento. FCT300 è
equipaggiato di un processore Freescale MPC8548 che prevede
un clock da 1.333 GHz con cache di primo e secondo livello. Le
risorse di comunicazione del controllore sono notevoli: 4 porte
Ethernet 10/100/1.000, 4 porte Can, 1 porta di comunicazione
general purpose (dove è possibile montare moduli Profibus,
Devicenet, Ethernet IP ecc.), 1 porta seriale RS232, 1 porta seriale
RS485-RS422. Su tali porte sono stati implementati vari protocolli,
altri sono implementabili su richiesta o realizzabili dal cliente. I
controllori sono inoltre basati su un sistema operativo standard
realtime (PreciseMQX) condriver sviluppati daCMZ. Dal prossimo
anno sullo stessa piattaforma hardware sarà possibile scegliere,
in alternativa all’esistente ambiente di sviluppo 4Control, anche
l’ambiente di sviluppo Codesys. CMZ ha parallelamente svilup-
pato una completa gamma di prodotti che si integrano con i si-
stemi della linea FCT: motori e azionamenti brushless e stepper,
moduli Canopen per interfacciamento di input/output digitali
e analogici, terminali e PC industriali. La completezza di gamma
permette una reale ottimizzazione delle prestazioni e dei costi e
rende CMZ decisamente competitiva nella fornitura di soluzioni
e servizi globali.
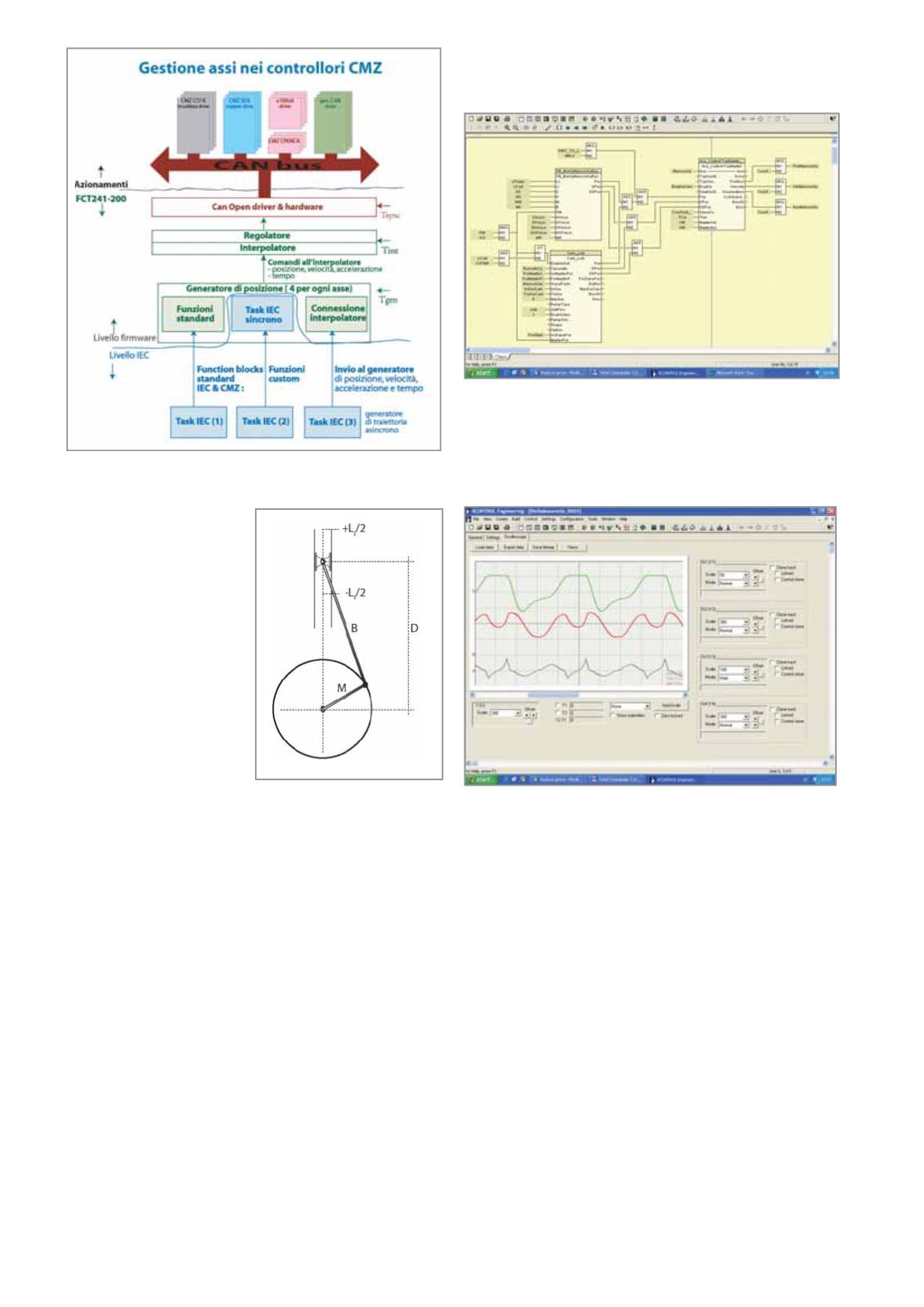
Fig. 6 - Il grafico mostra l’andamento della velocità della
manovella (linea rossa), della velocità del piede della biella
(linea verde) dove si nota il tratto a velocità costante e
l’accelerazione della manovella (linea grigia)
Fig. 3 - La struttura generale del programma di gestione assi
nei controllori CMZ
Fig. 4 - La linearizzazione in
un certo tratto del
movimento del piede di un
meccanismo biellamanovella
Fig. 5 - Il movimento della manovella è il contributo di due
generatori di traiettoria: il primo blocco custom
FB_BiellaManovellaRac genera il movimento della
manovella nel tratto di linearizzazione, il secondo blocco di
libreria (Cam_Link) genera il profilo di recupero e raccordo


