Maplesoft: MapleSim per il movimento di sistemi ottici complessi
-

- Tweet
- Pin It
- Condividi per email
-
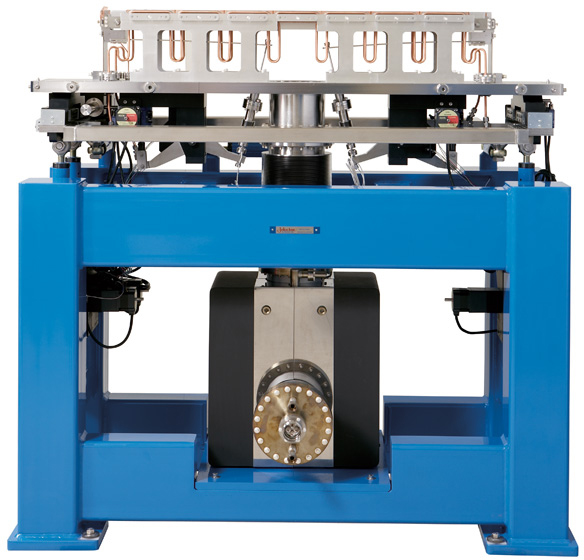
Un team della Canadian Light Source Inc. – centro leader mondiale di ricerca sincrotronica – ha utilizzato MapleSim di Maplesoft come tool di modellazione per determinare il posizionamento di una montatura cinematica dello specchio a sei supporti. Il modello di questa struttura è stato facilmente costruito con MapleSim. Le equazioni che descrivono il sistema sono state generate automaticamente dal modello e semplificate dal motore simbolico Maple. I risultati del movimento simulato degli attuatori sono stati utilizzati per ottenere la posizione indotta e l´orientamento dello specchio. Questa informazione è stata quindi usata come input per il tracciamento dei raggi. Il movimento delle montature cinematiche a sei supporti è tale per cui l´arco di movimento di ciascun supporto determina errori di coseno che provocano un leggero accoppiamento di assi altrimenti indipendenti. Di conseguenza, il movimento in una direzione qualsiasi può provocare un leggero movimento in un´altra direzione e anche alterare l´orientamento rotazionale. In mancanza di uno strumento che quantifichi correttamente questi cambiamenti di posizione e orientamento, il tracciamento dei raggi potrebbe non essere altamente preciso.
MapleSim ha offerto un modo per dedurre il posizionamento e l´orientamento effettivi di queste montature cinematiche a sei montanti in funzione dei motori che ne controllano i movimenti. Una comprensione più realistica del funzionamento del sistema a sei assi è utile per l´allineamento del fascio ottico ed il miglioramento delle prestazioni. L´obiettivo finale del team della Canadian Light Source è creare un sistema di tracciamento in tempo reale dei raggi x, che utilizza il sistema di controllo del fascio di luce per accedere alle posizioni dei componenti ottici e inviarle quindi come input a un programma di tracciamento dei raggi x. Il modello MapleSim è stato costruito utilizzando palette specifiche come i blocchi di segnali o i componenti multi-body. I montanti sono stati modellati utilizzando un corpo rigido 3D, due frame per corpi rigidi e due snodi sferici della libreria multi-body. E´ stato anche possibile creare un´animazione del sistema in movimento utilizzando file STL esportati dal CAD. Il motore simbolico Maple è stato utilizzato per eseguire la semplificazione del modello, permettendo di ridurne le equazioni fondamentali senza alcuna perdita di precisione. MapleSim ha permesso il riutilizzo dei sistemi convertendoli in sottosistemi. La struttura dello specchio è stata modellata come corpo rigido con frame specifici che definiscono lo spostamento dal centro di massa ai punti di connessione su cui sono fissati i montanti. Vi è anche un frame per corpo rigido addizionale che definisce lo spostamento verso il polo dello specchio.
Un´applicazione immediata dei risultati è l´utilizzo di questa informazione posizionale per ridurre gli errori di coseno, migliorare i risultati di tracciamento dei raggi e agevolare l´allineamento del sistema ottico. I risultati della simulazione sono stati utilizzati per verificare la look-up table fornita dal venditore (che indica la posizione e l´orientamento dello specchio in funzione delle posizioni degli attuatori) includendo anche le posizioni dei motori stessi non previste.
Maplesoft: www.maplesoft.com
Contenuti correlati
-
 A Torino, l’intelligenza artificiale è protagonista: indicazioni e raccomandazioni per una corretta applicazione
A Torino, l’intelligenza artificiale è protagonista: indicazioni e raccomandazioni per una corretta applicazioneNon lasciamoci ingannare dal fascino dell’ AI (Intelligenza Artificiale) e al tempo stesso creiamo le migliori condizioni per infondere tra le imprese italiane, in particolare nelle PMI, un senso di fiducia e di prospettiva positiva legata all’adozione...
-
 Cybersecurity: le 5 predictions di Trend Micro per il 2024
Cybersecurity: le 5 predictions di Trend Micro per il 2024Trend Micro ha presentato questa settimana alla stampa tecnica i risultati dello studio “Critical Scalability”, la nuova edizione del famoso report annuale che analizza il panorama della sicurezza e presenta le minacce informatiche che imperverseranno nel corso dell’anno....
-
 Nokia e EY lanciano uno studio sul metaverso
Nokia e EY lanciano uno studio sul metaversoSecondo uno studio pubblicato da Nokia ed EY, le aziende che hanno già implementato casi d’uso del metaverso industriale stanno riscontrando maggiori benefici rispetto a quelle ancora in fase di pianificazione, in particolare per quanto riguarda la...
-
 Etichette elettroniche per informare: lo studio Total Economic Impact
Etichette elettroniche per informare: lo studio Total Economic ImpactIl mondo del retail sta vivendo un’inarrestabile evoluzione e si trova ad affrontare forti pressioni dettate da fattori che fino a poco tempo fa erano imprevedibili: l’aumento dei costi di produzione e delle materie prime, i rincari...
-
 I responsabili della cybersecurity italiani sono preoccupati
I responsabili della cybersecurity italiani sono preoccupatiLe organizzazioni lottano per definire e mettere al sicuro una superficie d’attacco sempre più in espansione e che rende difficile la gestione dei rischi. Il dato emerge da “MAPPING THE DIGITAL ATTACK SURFACE: Why global organisations are...
-
 Il Covid-19 e le nuove richieste dei consumatori fanno esplodere la stampa 3D
Il Covid-19 e le nuove richieste dei consumatori fanno esplodere la stampa 3DFormlabs ha pubblicato il rapporto 2022 sulle applicazioni della stampa 3D che analizza come si sono evolute l’adozione della stampa 3D e i casi d’uso negli ultimi due anni. Da marzo 2020, i tassi di adozione della...
-
 Studio europeo: la trasformazione digitale nella logistica è ancora all’inizio
Studio europeo: la trasformazione digitale nella logistica è ancora all’inizioLa trasformazione digitale nella logistica è ancora agli inizi per la maggior parte delle aziende in Europa, e solo un terzo (33%), ha iniziato ad attuare una propria strategia. Questo è il risultato di un sondaggio che...
-
 SAP annuncia i risultati dello studio “Il paradosso della supply chain sostenibile”
SAP annuncia i risultati dello studio “Il paradosso della supply chain sostenibile”L’epoca in cui bastava porsi modesti obiettivi di sostenibilità è definitivamente alle nostre spalle. Oggi, per le aziende di qualsiasi settore o Paese è urgente poter realizzare e gestire supply chain sostenibili. In questa fase di ripresa...
-
 Parigi, 6 settembre 2021: Rapporto OCSE sulla ripresa post-Covid in Italia
Parigi, 6 settembre 2021: Rapporto OCSE sulla ripresa post-Covid in ItaliaL’ultimo Studio economico dell’OCSE sull’Italia evidenzia che il sostegno del Governo alle famiglie e alle imprese italiane duramente colpite dalla crisi dovrebbe continuare fino a quando la ripresa non si sarà ampiamente consolidata e dovrebbe divenire sempre...
-
 L’Internet of Things in Italia nel 2021 vale 8 miliardi di euro
L’Internet of Things in Italia nel 2021 vale 8 miliardi di euroL’Internet of Things (IoT) è un contenitore di tanti ambiti applicativi che, messi insieme, nel 2021 in Italia totalizzano un valore di 8 miliardi di euro e la pandemia ha accelerato il processo, prevede GreenVulcano Technologies basandosi...
Scopri le novità scelte per te
-
A Torino, l’intelligenza artificiale è protagonista: indicazioni e raccomandazioni per una corretta applicazione
Non lasciamoci ingannare dal fascino dell’ AI (Intelligenza Artificiale) e al tempo stesso creiamo le migliori condizioni...
-
Cybersecurity: le 5 predictions di Trend Micro per il 2024
Trend Micro ha presentato questa settimana alla stampa tecnica i risultati dello studio “Critical Scalability”, la nuova edizione...





Notizie Tutti ▶
-
 Clusit, Anna Vaccarelli eletta presidente
Clusit, Anna Vaccarelli eletta presidenteÈ Anna Vaccarelli la nuova presidente di Clusit, Associazione Italiana per la Sicurezza Informatica. I...
-
 Inclusione e parità: il percorso di RS Italia verso un futuro più equo
Inclusione e parità: il percorso di RS Italia verso un futuro più equoPer RS Italia, il 2024 è stato un anno molto importante per rafforzare la...
-
 AI generativa per le presse Mecolpress per lo stampaggio a caldo
AI generativa per le presse Mecolpress per lo stampaggio a caldoMecolpress, punto di riferimento nel settore della produzione di presse per lo stampaggio a...
Prodotti Tutti ▶
-
 Gestione dell’energia nell’armadio di comando con EcoStruxure Panel Server di Schneider Electric
Gestione dell’energia nell’armadio di comando con EcoStruxure Panel Server di Schneider ElectricSchneider Electric presenta il suo gateway IoT della prossima generazione: “L’unità Panel Server PAS...
-
 Protezione contro le sovratensioni per router in fibra ottica
Protezione contro le sovratensioni per router in fibra otticaA fronte di un’inarrestabile espansione delle reti in fibra ottica, per le connessioni Internet...
-
 Con un ‘clic’ per un cablaggio più sicuro
Con un ‘clic’ per un cablaggio più sicuroVeloce come schioccare le dita: la nuova tecnologia di connessione Snap IN di Weidmüller...


{kind=link}