

















 89 / 100
89 / 100

tecnica
89
Automazione e Strumentazione
Novembre/Dicembre 2017
BIOMEDICALE
di
farmacocinetica-farmacodinamica
(PK-PD). In partico-
lare, per ciascun farmaco una parte lineare di farmacocinetica
descritta con un modello compartimentale lega la velocità di
infusione alla concentrazione plasmatica nel sangue. In serie,
un modello lineare di farmacodinamica descrive il legame tra
concentrazione plasmatica e concentrazione nel sito effet-
tore, ovvero la concentrazione del farmaco a livello cere-
brale. I parametri della parte lineare del modello di PK-PD
sono calcolati mediante relazioni matematiche e dipendono
dai dati demografici e antropometrici del paziente (altezza,
peso, età, sesso). L’interazione tra i due farmaci e l’effetto
clinico descritto dal BIS sono descritti da una relazione alge-
brica non lineare chiamata funzione di Hill. Nella
υ
figura
1
è rappresentato uno schema riassuntivo del modello. Per lo
sviluppo del sistema di controllo si considerano i modelli di
13 pazienti disponibili in letteratura e rappresentativi di un
ampio range di popolazione
[2]
.
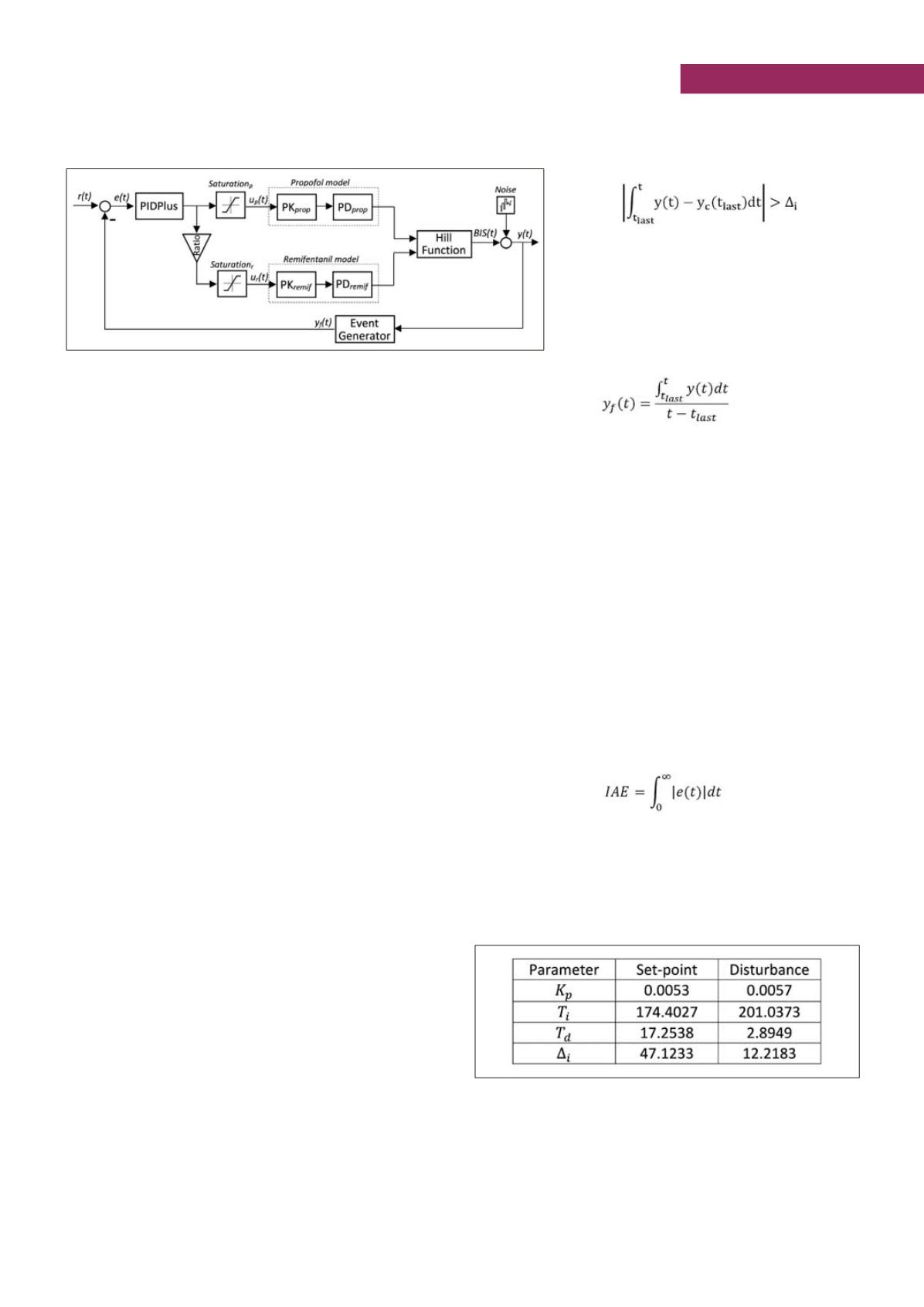
Struttura di controllo
La struttura di controllo proposta è rappresentata nella
υ
figura
2
, dove r(t) è il set-point del sistema, ovvero il livello di BIS desi-
derato. Nella pratica clinica è fissato a 50, ma un livello compreso
tra 40 e 60 è considerato soddisfacente. Quindi,
e(t)
è la variabile
d’errore e
u
p
(t)
e
u
r
(t)
sono le velocità di infusione di propofol
e remifentanil. Il blocco ratio è un guadagno che considera la
presenza di due ingressi e viene fissato a 2 per garantire un rap-
porto di infusioni adeguato alla pratica clinica. I blocchi di satu-
razione rappresentano i limiti di velocità di infusione di pompe
infusive standard. Il blocco noise rappresenta il rumore presente
sul segnale di BIS, descritto come rumore bianco con parametri
stimati da acquisizioni del segnale (tempo di campionamento 5 s
e deviazione standard di 4.45). Il cuore del sistema di controllo è
rappresentato dal generatore d’eventi e dal controllore
PIDPlus
.
Quest’ultimo è un PID a eventi utilizzato nella pratica industriale
e presenta tre parametri di taratura: il guadagno proporzionale
K
p
,
la costante di tempo integrale
T
i
e quella derivativa
T
d
. Rispetto
al PID standard l’azione di controllo viene calcolata solo in cor-
rispondenza degli eventi e mantenuta costante tra eventi succes-
sivi. Il generatore d’eventi, proposto in
[3]
, applica una tecnica
di
Send-On-Delta
(SOD) sull’integrale del segnale di BIS intro-
ducendo un effetto filtrante delle alte frequenze e nel contempo
influendo poco sulle prestazioni del sistema di controllo. La con-
dizione di generazione degli eventi è:
dove
y(t)
è la variabile di processo da campionare,
y
c
(t
last
)
è l’ultimo campione inviato,
t
last
è l’istante di
tempo dell’evento precedente,
t
è l’istante di tempo
attuale e Δ
i
è un parametro di taratura. Il valore da
inviare al controllore è calcolato come:
Taratura del sistema di controllo
Le specifiche di controllo della pratica clinica richiedono che
il livello di BIS, partendo da un livello prossimo al 100, rag-
giunga il valore di set-point (fissato a 50) in circa 5 min senza
eccessive sotto-elongazioni. Durante la fase di mantenimento il
controllore deve mantenere il livello di BIS nel range 40-60 e
compensare eventuali disturbi, modellizzati in questo articolo
come uno scalino positivo di ampiezza 10 nel segnale di BIS
seguito da uno scalino negativo della stessa ampiezza. Il con-
trollore deve inoltre essere robusto rispetto alla variabilità inter-
paziente, ovvero alle diversità di risposta ai farmaci in diversi
pazienti. La taratura del PIDPlus e del generatore d’eventi (
K
p
,
T
i
,
T
d
, e
Δ
i
) è stata effettuata con algoritmi genetici conside-
rando i 13 pazienti standard e minimizzando l’
Integral Abso-
lute Error
(IAE) della risposta del caso peggiore:
Sono stati determinati due differenti set di parametri in modo
da applicare una tecnica di gain scheduling tra fase di infu-
sione e fase di mantenimento e incrementare le prestazioni del
sistema nelle diverse fasi dell’anestesia. I valori dei parametri
di taratura sono riportati nella tabella.
Risultati
La struttura di controllo proposta è stata testata in simulazione
sul set di modelli di pazienti considerati. Nelle figure 3 e 4 sono
riportati i risultati per un paziente del database, considerato come
paziente medio, per la risposta al set-point e al disturbo rispetti-
Figura 2 - Struttura di controllo ad eventi
Tabella - Tarature del sistema di controllo