
















 136 / 152
136 / 152

SETTEMBRE 2017
AUTOMAZIONE OGGI 400
136
AO
TUTORIAL
senza mappe HD. Questo approccio si basa sul GPS per la loca-
lizzazione approssimativa utilizzando i sensori AV per monitorare
le modifiche nell’ambiente e quindi perfezionare le informazioni
di posizionamento. Un tale sistema, ad esempio, utilizza i dati di
posizione GPS in combinazione con le immagini catturate dalle
telecamere a bordo. L’analisi comparativa frame-by-frame riduce
l’intervallo di errore del segnale GPS. L’intervallo di confidenza
del 95% per la geolocalizzazione orizzontale del GPS è di circa
otto metri, che può essere la differenza tra la guida nella corsia
di destra o nella direzione opposta. Entrambi gli approcci dipen-
dono in modo rilevante dai sistemi di navigazione inerziale e dai
dati di odometria. L’esperienza dimostra che il primo approccio
è generalmente molto più robusto e consente una localizzazione
più accurata, mentre la seconda tecnica è di più facile implemen-
tazione, in quanto non sono necessarie mappe HD. Date le dif-
ferenze di precisione tra i due, i progettisti possono utilizzare il
secondo approccio nelle aree dove le informazioni precise sulla
posizione dei veicoli non sono fondamentali per la navigazione.
Processo decisionale
I veicoli completamente autonomi dovrebbero prendere migliaia
di decisioni per ogni chilometro percorso e attualmente si utiliz-
zano alcuni metodi per poterlo permettere. Per identificare sce-
nari specifici e prendere decisioni adeguate, i sistemi decisionali
di oggi impiegano principalmente reti neurali. La natura com-
plessa di queste reti può però rendere difficile capire le cause o
la logica di determinate decisioni. Un altro metodo è dato dalle
decisioni basate su regole determinate dalla maggior parte delle
combinazioni possibili (regole if-then). Il tempo e lo sforzo signi-
ficativi richiesti, nonché la probabile incapacità di includere ogni
caso potenziale, rendono questo approccio potenzialmente fal-
limentare. Visti i limiti dei primi due metodi, molti esperti consi-
derano ideale applicare un approccio ibrido che utilizzi entrambi
i metodi. Gli sviluppatori possono risolvere la complessità intrin-
seca delle reti neurali introducendo reti neurali specifiche di ri-
dondanza per processi individuali collegati da una rete neurale
centralizzata. L’approccio ibrido, combinato con modelli di stati-
stica di inferenza, è oggi il più diffuso. Per ciò che riguarda i test,
si può affermare che l’industria automobilistica ha già un’espe-
rienza significativa e anche in questo caso sono utilizzati metodi
ibridi che uniscono l’analisi statistica dei dati, intrapresa grazie a
sperimentazioni di milioni di chilometri di guida con le simula-
zioni sia software sia hardware. Per raccogliere dati sufficienti è
necessario praticare test per milioni di chilometri. La ricerca indica
che sarebbero necessari circa 300 milioni chilometri di test per
determinare, con un livello di confidenza pari al 95%, un tasso
massimo di 1,09 incidenti mortali ogni 130 milioni di chilometri
percorsi che è il dato equivalente al tasso di mortalità degli Stati
Uniti del 2013. Per elevare le prestazioni rispetto ai valori determi-
nati dagli umani, il numero di chilometri richiesti dovrebbe salire
di almeno un ordine di grandezza. Per cui se 100 veicoli autonomi
dovessero guidare 24 ore al giorno, 365 giorni l’anno, con una
velocità media di 25 miglia all’ora, ci vorrebbero più di dieci anni
per raggiungere 300 milioni di chilometri.
Conclusioni
Mentre gli esperti indicano in un decennio la comparsa dei primi
veicoli completamente autonomi, l’industria potrebbe compri-
mere i tempi accelerando il processo di sviluppo attraverso un
nuovo modo di fare sviluppo. I diversi attori industriali stanno, in-
fatti, riconoscendo la valenza delle partnership collaborando alla
formazione di partenariati di settore orientandosi verso soluzioni
non esclusivamente proprietarie dotate di componenti plug-and-
play interoperabili e modulari che siano in grado di far fronte non
solo alla richiesta di accelerazione tecnologica ma anche alla ne-
cessaria robustezza e affidabilità richiesta a tali sistemi.
•
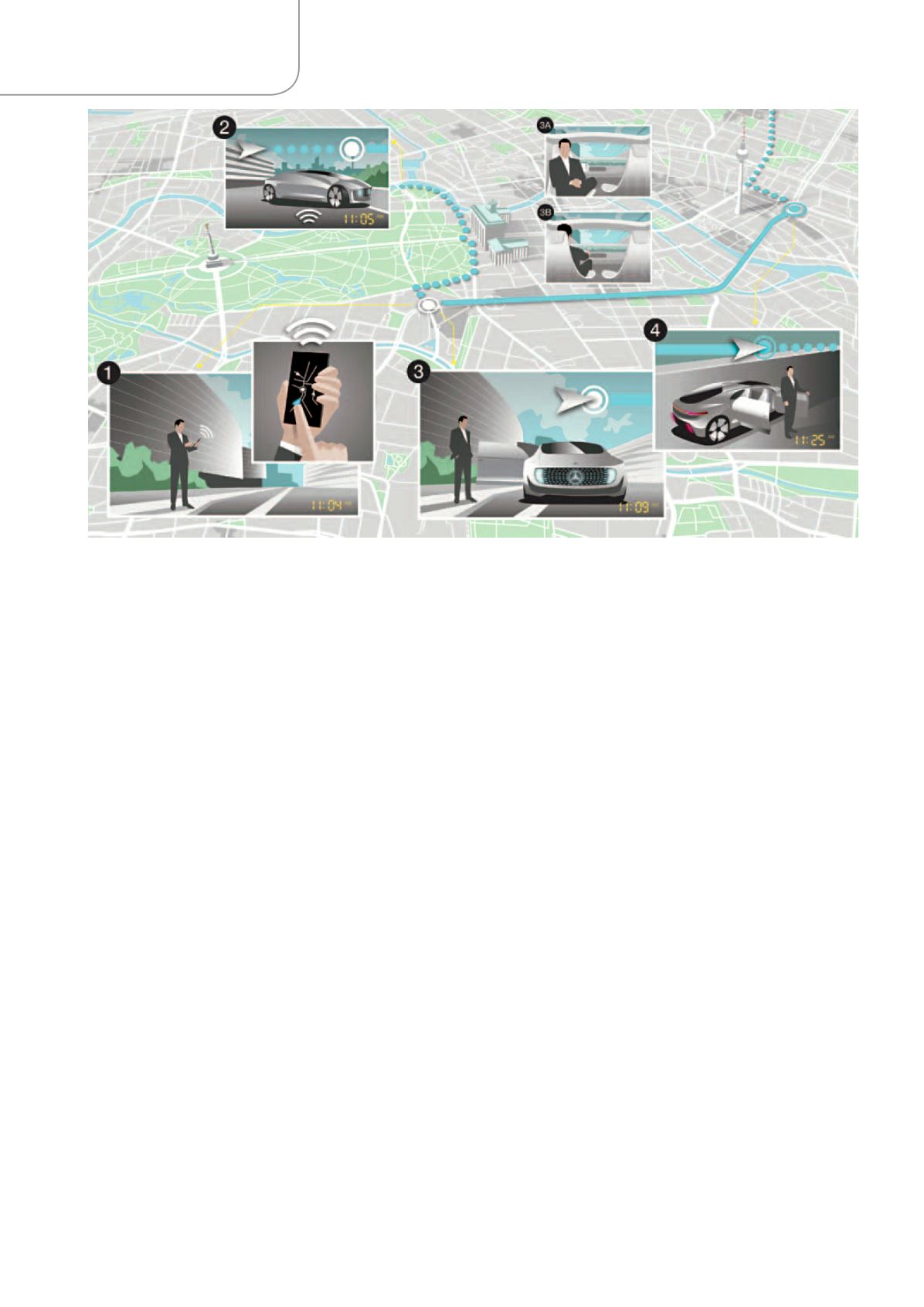
Le vetture a guida autonoma di livello 5 e la scala SAE International non richiederanno alcun intervento diretto da parte di chi si
trova a bordo e potranno essere trasformate in uno spazio ambulante per l’intrattenimento o per la produttività.
FonteMercedes