
















 134 / 152
134 / 152

SETTEMBRE 2017
AUTOMAZIONE OGGI 400
134
AO
TUTORIAL
lizzo che gli esperti devono comprendere. In assenza di linee di
separazione delle corsie o su strade non asfaltate, ad esempio, i
sistemi dovranno essere in grado di individuare le aree adeguate
alla percorrenza. Tenuto conto, quindi, delle attuali tendenze di
sviluppo, i veicoli completamente autonomi non saranno dispo-
nibili nei prossimi dieci anni e il principale vincolo è costituito
dallo sviluppo del software. Le telecamere per i sensori presen-
tano attualmente l’intervallo, la risoluzione e il campo visivo ri-
chiesti anche se presentano ancora limiti importanti in condizioni
meteorologiche avverse. Il sistema radar è già tecnologicamente
maturo e rappresenta un’ottima opzione per la rilevazione in con-
dizioni meteorologiche e condizioni stradali non ideali. Le funzio-
nalità dell’hardware si stanno già avvicinando ai livelli necessari
per determinare un buon funzionamento e la tecnologia attuale
dovrebbe raggiungere in breve tempo i livelli richiesti di potenza
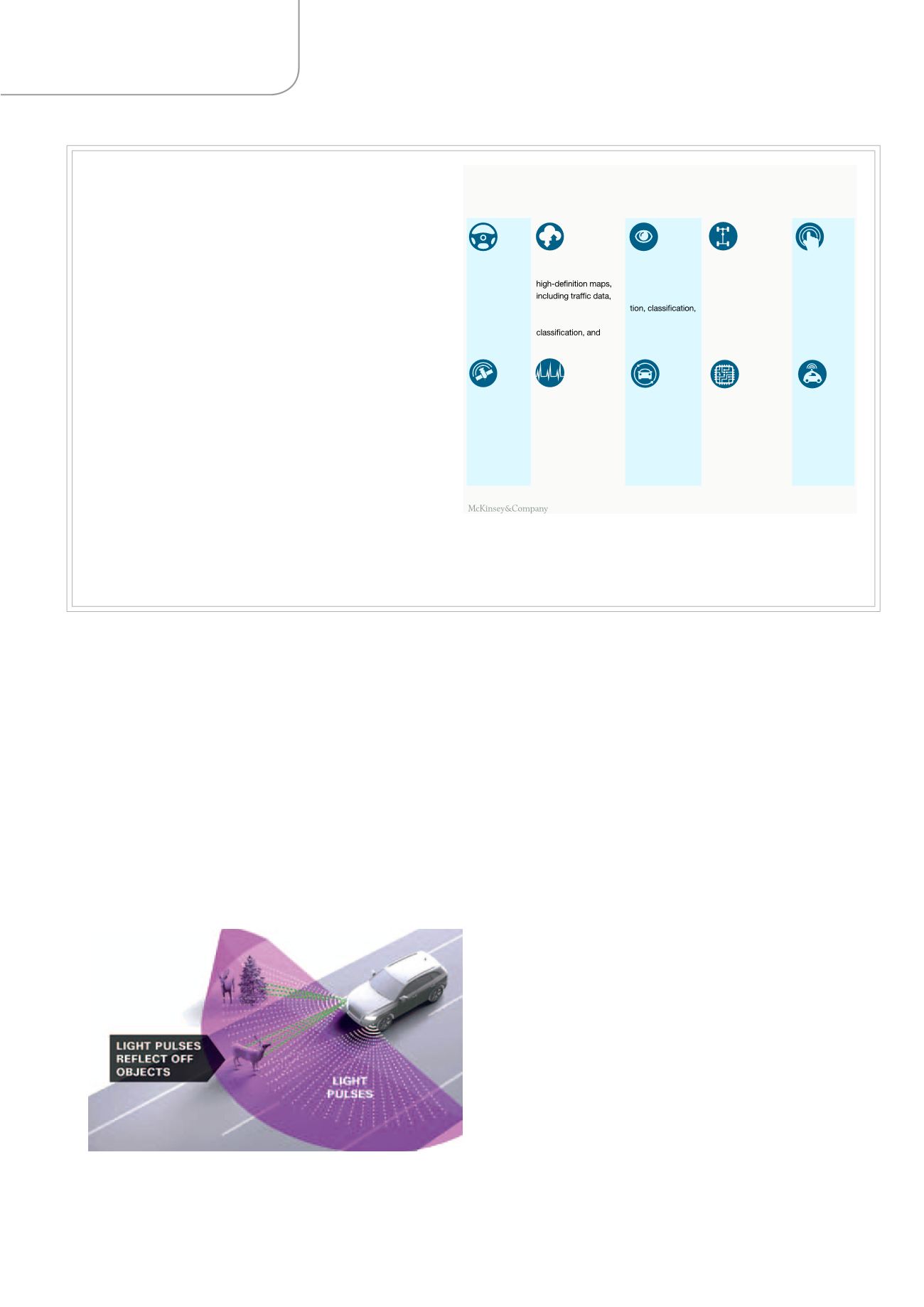
di calcolo per le unità di elaborazione. I sistemi Lidar (Light de-
tection and ranging), che utilizzano i fasci di luce per stimare le
distanze tra ostacoli, sono già oggi disponibili offrendo un ottimo
campo visivo a 360 gradi con un elevato livello di precisione.
Mentre le innovazioni hardware forniscono già potenzialità ade-
guate alla sfida, il software rimane il vero collo di bottiglia.
Software collo di bottiglia
Probabilmente l’unico ostacolo che rimane alla vera self driving
car rimane proprio il software. Gli autoveicoli per diventare com-
pletamente autonomi dovrebbero, infatti, essere in grado di im-
parare a negoziare modelli di guida di altri autoveicoli guidati sia
da conducenti umani sia da AV. Per esempio è necessario miglio-
rare la localizzazione dei veicoli con un grado di precisione molto
elevato rispetto a quello attuale con sensori GPS più precisi. La
determinazione della soluzione a questo tipo di sfide richiede
non solo significativi progressi di ricerca e sviluppo, ma anche
lunghi periodi di test, validazione e certificazione.
Tre tipi di problemi illustrano in modo più specifico il problema
del software. In primo luogo, l’analisi degli oggetti a partire dalla
loro rilevazione fino alla relativa rappresentazione è fondamen-
tale per veicoli autonomi. I sistemi di bordo, ad esempio, dovreb-
bero trattare in modo differente oggetti come motociclette e
biciclette catturandone le differenze di comportamento poten-
ziale proprio durante la fase di analisi degli oggetti.
La sfida iniziale nell’analisi degli oggetti è costituita dalla rileva-
zione, che può essere anche molto difficile a seconda del tipo di
luce presente, dello sfondo e dai movimenti che questi possono
effettuare. Inoltre, la compresenza di sensori, necessaria per con-
validare l’esistenza e il tipo di un oggetto, è tecnicamente impe-
gnativa per ottenere le vere differenze tra i tipi di dati che tali
sistemi devono confrontare come la nuvola di punti (da lidar),
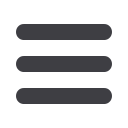
Le frontiere della self driving car
Le aziende impegnate nello sviluppo dei veicoli a guida autonoma hanno a che
fare con diversi aspetti della tecnologia come l’attuazione per la conduzione, la
frenata e l’accelerazione oppure il cloud che deve essere aggiornato in tempo
reale con le mappe ad alta definizione che includono i dati di traffico, mappe
stradali e logiche di decision making. Un altro tema è costituito dalla capacità
percettiva e di analisi degli oggetti per la loro acquisizione, classificazione
e tracciatura attraverso algoritmi adeguati. Il drive control costituisce l’area
tecnologica che converte l’output degli algoritmi di calcolo in segnali per gli
attuatori per la gestione del veicolo.
In aggiunta è da considerare il decision making per la pianificazione dei per-
corsi, la gestione delle traiettorie e il governo delle manovre oltre alla gestione
della localizzazione che sia in grado di effettuare l’incorporamento dei dati
delle mappe ambientali con la posizione istantanea del veicolo.
La capacità analitica dei veicolo è un ulteriore aspetto particolarmente impor-
tante che una piattaforma di monitoraggio deve effettuare in realtime per l’in-
dividuazione degli errori e la conseguente generazione delle raccomandazioni
più adeguate alla loro risoluzione. Il sistema operativo deve essere in grado di
governare tutti i processi realtime così come l’hardware ad alte prestazioni,
elevata affidabilità e a basso consumo (SOC, System on a Chip) deve far parte
dalla mappa dei sistemi dei veicoli AV. Infine non si può tralasciare la sensoristica a bordo. Già oggi le auto sono dotate di decine di sensori per il supporto al conducente
ma in futuro sistemi come lidar, radar e telecamere saranno essenziali per avviarci verso il traguardo.
I sistemi Lidar (Light detection and ranging) utilizzano i fasci
di luce per stimare le distanze tra ostacoli e sono già oggi
disponibili offrendo un ottimo campo visivo a 360 gradi
con un elevato livello di precisione
Several elements make up an autonomous driving system.
Elementsofautonomousdrivingsystem
Cloud
Learningandupdating
aswellasalgorithms
forobjectdetection,
decisionmaking
Actuation
Steering,
braking,and
acceleration
Drivecontrol
Converting
algorithmoutputs
intodrivesignal for
actuators
Decision
making
Planning
vehiclepath,
trajectory,and
maneuvers
Analytics
Platform formonitor -
ingautonomous
system’soperation,
detecting faults,
andgenerating
recommendations
Perceptionand
objectanalysis
Objectand
obstacledetec -
and tracking
Localization
andmapping
Data fusion for
environment
mappingand
vehicle
localization
Middlewareor
operating
system
Middleware
and real-time
operatingsystem
to runalgorithms
Computer
hardware
High-performance,
low-power-
consumptionsystem
onachip (SOC)with
high reliability
Sensors
Multiple
sensors,
including lidar,
sonar, radar,
andcameras
Gli aspetti principali della tecnologia abilitante la self driving car