

















 21 / 100
21 / 100

LUGLIO-AGOSTO 2015
Automazione Oggi 383
21
NA
HEIDENHAIN
COPERTINA
HEIDENHAIN
COPERTINA
HEIDENHAIN
COPERTINA
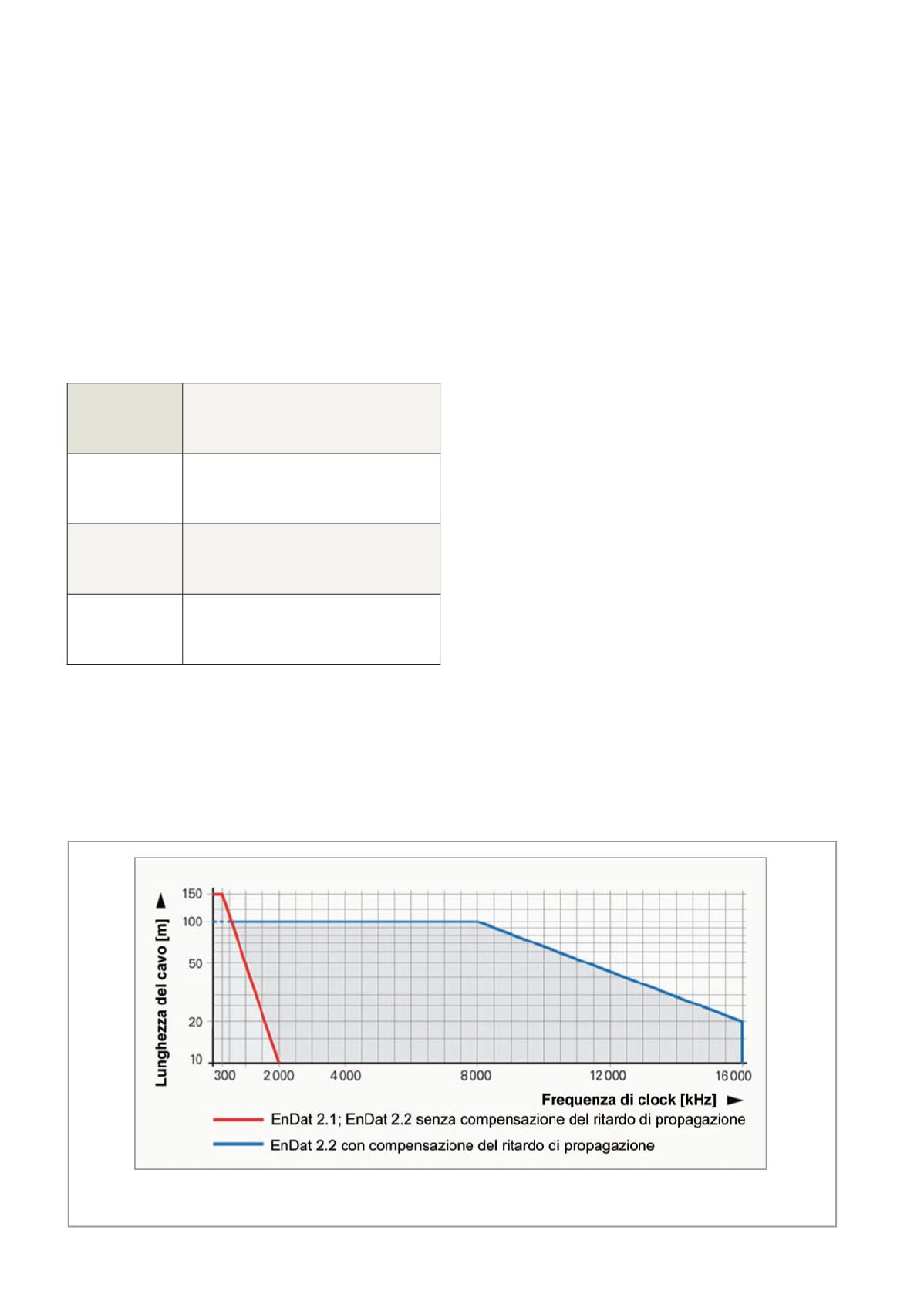
Frequenza di clock
La frequenza di clock è variabile a seconda della lunghezza del
cavo (max. 150 m) - tra 100 kHz e 2 MHz. Con la compensazione
del tempodi propagazionenell’elettronica successiva, sonopossi
bili frequenze di clock fino a 16MHz oppure cavi fino a 100metri.
Per sistemi di misura EnDat con codice EnDat x2 la massima fre
quenza di clock è allocata nella memoria del sistema di misura.
Per tutti gli altri sistemi di misura la massima frequenza di clock è
2 MHz. La compensazione del tempo di propagazione è prevista
solo per designazioni EnDat 21 e EnDat 22.
Frequenze di trasmissione fino a 16 MHz insieme a cavi di grandi
lunghezze impongono elevati requisiti costruttivi al cavo. Grazie
alla tecnologia di trasferimento dati, il cavo adattatore collegato
direttamente all’encoder non deve superare i 20 metri. Distanze
maggiori possono essere realizzate con un cavo adattatore fino a
6metri eunaprolunga. Di norma, l’interopercorsodi trasmissione
deve essere progettato per la relativa frequenza di clock.
Nota su EnDat02
I sistemi di misura con EnDat02 possono essere equipaggiati con
un cavo a innesto. Nella scelta del cavo adattatore, il cliente dovrà
anchedecidere se il sistemadimisuraopereràcon segnaliincremen-
tali o senza. Questo interessa anche la frequenza di clock massima
possibile. Per cavi adattatori con segnali incrementali la frequenza
di clock è limitata a un massimo di 2 MHz; vedi anche EnDat 01.
Per cavi adattatori senza segnali incrementali, la frequenzadi clock
può arrivare fino a 16MHz. I valori esatti vengono salvati nellame-
moria del sistema di misura.
Valori di posizione
Il valore di posizione può essere trasmesso con o senza dati ag
giuntivi. Non viene trasmesso alle elettroniche successive fino a
quando il tempo di calcolo t cal è passato. Il tempo di calcolo è ac
certato alla frequenza di clockmassima ammissibile per il sistema
di misura, ma in nessun caso maggiore di 8 MHz. Solo il numero
di bit richiesto è trasferito per il valore di posizione. Il numero di
bit dipende dal sistema di misura utilizzato e può essere letto dal
sistema di misura per la parametrizzazione automatica.
Modi operativi tipici
Modalità di funzionamento Endat 2.1: è per sistemi di misura
che forniscono segnali incrementali aggiuntivi. La posizione
assoluta viene letta una volta insieme alla posizione incremen
tale ed entrambe sono usate per calcolare il valore di posizione.
Altrimenti, il valore di posizione del circuito di regolazione viene
formato sulla base dei segnali incrementali. Vengono utilizzati
solo comandi Mode EnDat 2.1. Modalità di funzionamento
EnDat 2.2: è per sistemi di misura puramente seriali. Il valore di
posizione viene letto dall’encoder in ciascun ciclo di controllo.
Tipicamente, i comandi Mode EnDat 2.2 sono utilizzati per leg
gere il valore di posizione, mentre i comandi Mode EnDat 2.1
sono utilizzati per leggere e scrivere i parametri dopo l’accen
sione. L’interfaccia EnDat 2.2 può interrogare la posizione e i
EnDat01
EnDatT
EnDatH
≤ 2 MHz (vedi “senza compensazione del tempo
di propagazione”
nel diagramma)
EnDat21
≤ 2 MHz
EnDat02
≤ 2 MHz o
≤ 8 MHz o 16 MHz
(vedi nota)
EnDat22
≤ 8 MHz o 16 MHz
In particolari condizioni, concordate conHeidenhain, si arriva addirittura a utilizzare cavi con lunghezze fino a 300m