CONTROLLO
approfondimenti
Automazione e Strumentazione
■
Novembre/Dicembre 2013
57
lore (PI oppure PID, con azione derivativa calco-
lata sulla variabile di processo e non sull’errore)
e dei parametri proporzionale (Kp), integrale (Ti)
e derivativo (Td) che possono essere impostati
manualmente o selezionando una delle regole
di taratura disponibili in libreria. PIDTutor sup-
porta le più note tecniche tra le quali anche quelle
basate su metodologie di ottimizzazione o quelle
più tradizionali basate sull’impostazione di pul-
sazione critica e margine di fase; alcune di esse
fanno differenza tra inseguimento del riferimento
e reiezione del di-sturbo per cui è possibile anche
selezionare quale dei due transitori privilegiare.
Sono a disposizione dell’utente anche il filtro
sull’azione derivativa (attraverso il parametro
N) e il peso sul setpoint, per impiegare un PID a
due gradi di libertà, in modo da poter perseguire
indipen-dentemente l’inseguimento e la reie-
zione. Infine, anche la costante di tempo dell’ac-
corgimento anti-windup è accessibile attraverso il
relativo pulsante.
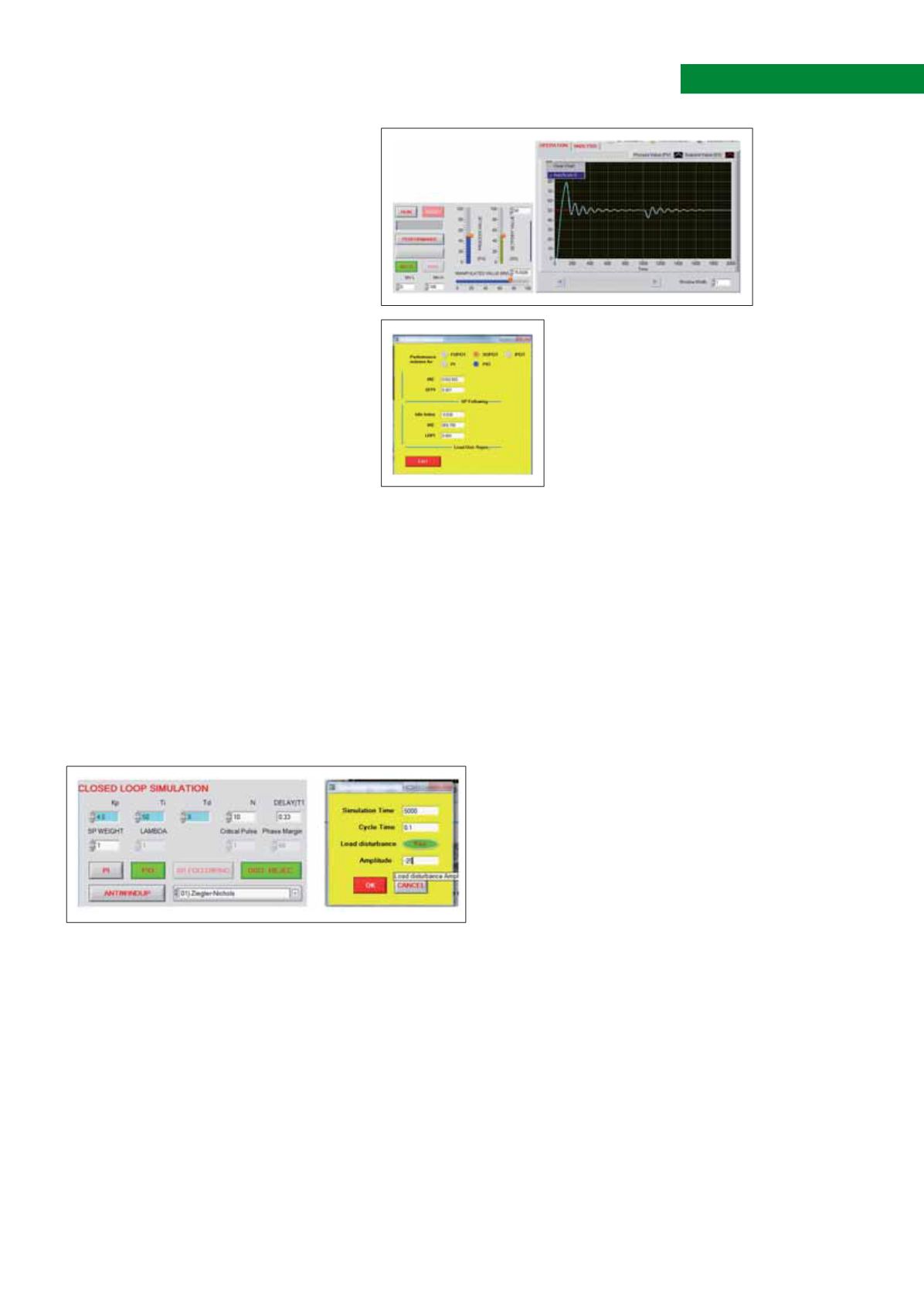
Una volta selezionata la taratura dei parametri
PID è possibile lanciare la simulazione in anello
chiuso, preceduta da un pop-up giallo (sempre
nella
υ
figura 3
) che richiede di impostare la
durata del transitorio, il tempo-ciclo e la presenza
o meno del disturbo a gradino sul carico (che
viene simulato a metà del transitorio) e la relativa
ampiezza. Essendo il tempo non reale, in pochi
secondi viene simulato un transitorio di molti
minuti, consentendo così all’utente di fare rapida-
mente varie prove.
L’evoluzione delle variabili viene visualizzata
“in progress” come dal pannello di controllo di
un controllore reale, in modo che l’utente possa
essere sufficientemente familiare con l’interfac-
cia e, fino a quando la durata della simulazione
non termina, possa anche effettuare variazioni
successive di setpoint o addirittura passare in
modo Man per variare manualmente l’uscita del
regolatore.
Passando poi al Tab “Analysis”, è possibile
anche visualizzare l’andamento della variabile
di controllo (MV), limitata tra i valori minimo
e massimo impostati nel pannello di controllo a
fianco (si veda la
υ
figura 4
).
Selezionando
“Performance”,
infine, appare un
pop-up giallo (
υ
figura 5
) nel quale sono pre-
sentati gli indici di prestazione relativi sia all’in-
seguimento del setpoint che alla reiezione del
disturbo sul carico. In particolare sono riportati
lo
IAE
(Integrale dei valori assoluti dell’errore, o
deviazione), il
Setpoint Following Performance
Index
(SFPI), l’
Idle-Index e il Load-Rejection
Performance Index
(LRPI), definiti come in
[1]
.
In questo modo l’utente può confrontare oggetti-
vamente e quantitativamente le prestazioni otte-
nute con degli obiettivi che per un PID possono
essere ragionevolmente ritenuti soddisfacenti.
Conclusioni
Semplici pacchetti di simula-
zione dei loop di regolazione
PID possono essere utili per
ridurre sia i tempi di commis-
sioning che quelli di retuning
nel corso del normale esercizio.
Fornendo all’utente una inter-
faccia più simile a quella su
cui si trova quotidianamente ad
operare si facilita la sua familia-
rizzazione con gli anelli di controllo, rappresen-
tando così un ausilio anche in fase di training del
personale. Disponendo anche di indici di presta-
zione risulta più agevole fare valutazioni ogget-
tive e confrontarsi con obiettivi ragionevoli.
Riferimenti
[1]
M. Veronesi, “Quanto valgono i vostri
anelli?”,
Automazione e Strumentazione
, Fiera
Milano media, n. 9, Nov./Dic. 2012.
[2]
M. Veronesi,
Regolazione PID. Tecniche di
taratura, schemi di controllo, valutazione delle
prestazioni
, FrancoAngeli, 2011.
■
Figura 4 - Visualizzazione delle variabili di controllo (MV),
di processo (PV) e set point (SV)
Figura 3 - L’impostazione dei parametri della simulazione in anello chiuso
Figura 5 - Pop-up delle performance


