

















 74 / 116
74 / 116

controllo
tecnica
Ottobre 2015
n
Automazione e Strumentazione
74
A livello di controllo, è comune la scelta di utilizzare un singolo anello di retroazione,
ma in molti casi un approccio multivariabile può migliorare sensibilmente le prestazioni del
sistema. Una tecnica di stima dei parametri di un modello approssimato dei processi
e delle loro interazioni consente di implementare delle formule di autotuning o di self-tuning
utilizzando i dati dei transitori. Si tratta di una tecnica robusta anche nei confronti del rumore
di misura normalmente presente nelle applicazioni reali.
Massimiliano Veronesi
Antonio Visioli
Regolazione:
tenere conto delle interazioni
Benché molti problemi di regolazione
vengano adeguatamente risolti chiuden-
do un singolo anello di retroazione sulla
variabile da controllare, in molti casi sa-
rebbe opportuno considerare anche alcu-
ne relazioni incrociate che essa ha con al-
tre grandezze fisiche in gioco. Spesso in-
fatti, tipicamente sui grandi impianti con-
tinui, pressioni portate e temperature non
sono indipendenti tra loro e invece le va-
riazioni di ognuna influenzano più o me-
no sensibilmente le altre; si pensi semplicemente
due fluidi della cui miscela sia necessario control-
lare sia la temperatura che la portata; si pensi ad
esempio ad un reattore dove le portate dei reagen-
ti determinano sia la concentrazione che la tem-
peratura ma a sua volta un’azione di controllo su
quest’ultima influenza anche la reazione chimica
e quindi la concentrazione; si pensi ad un sepa-
ratore di fase ove il controllo di livello del liqui-
do interagisce con quello della pressione del gas;
si pensi ad esempio alle complesse relazioni tra
portate/livelli e temperature/concentrazioni in una
colonna di distillazione. La vera natura del pro-
blema di controllo è allora multivariabile (Mimo:
Multiple Input Multiple Output) e trattarlo come
insieme di regolazioni Siso (Single Input Single
Output) può costituire una semplificazione tanto
più inefficace quanto maggiori sono le interazio-
ni trascurate.
Controllo multivariabile
Il problema di controllo è Mimo quando ciascuna
delle variabili di controllo ha un effetto su più di
una variabile da controllare. Un generico sistema
multivariabile può essere dunque modellizzato
da una matrice di funzioni di trasferimento le cui
righe sono in numero pari alle variabili di con-
trollo a disposizione e le cui colonne sono invece
in numero pari a quello delle variabili da control-
lare. Ciascun elemento della matrice rappresenta
ovviamente la funzione di trasferimento tra la
variabile di controllo corrispondente al suo indice
di riga e la variabile da controllare associata al
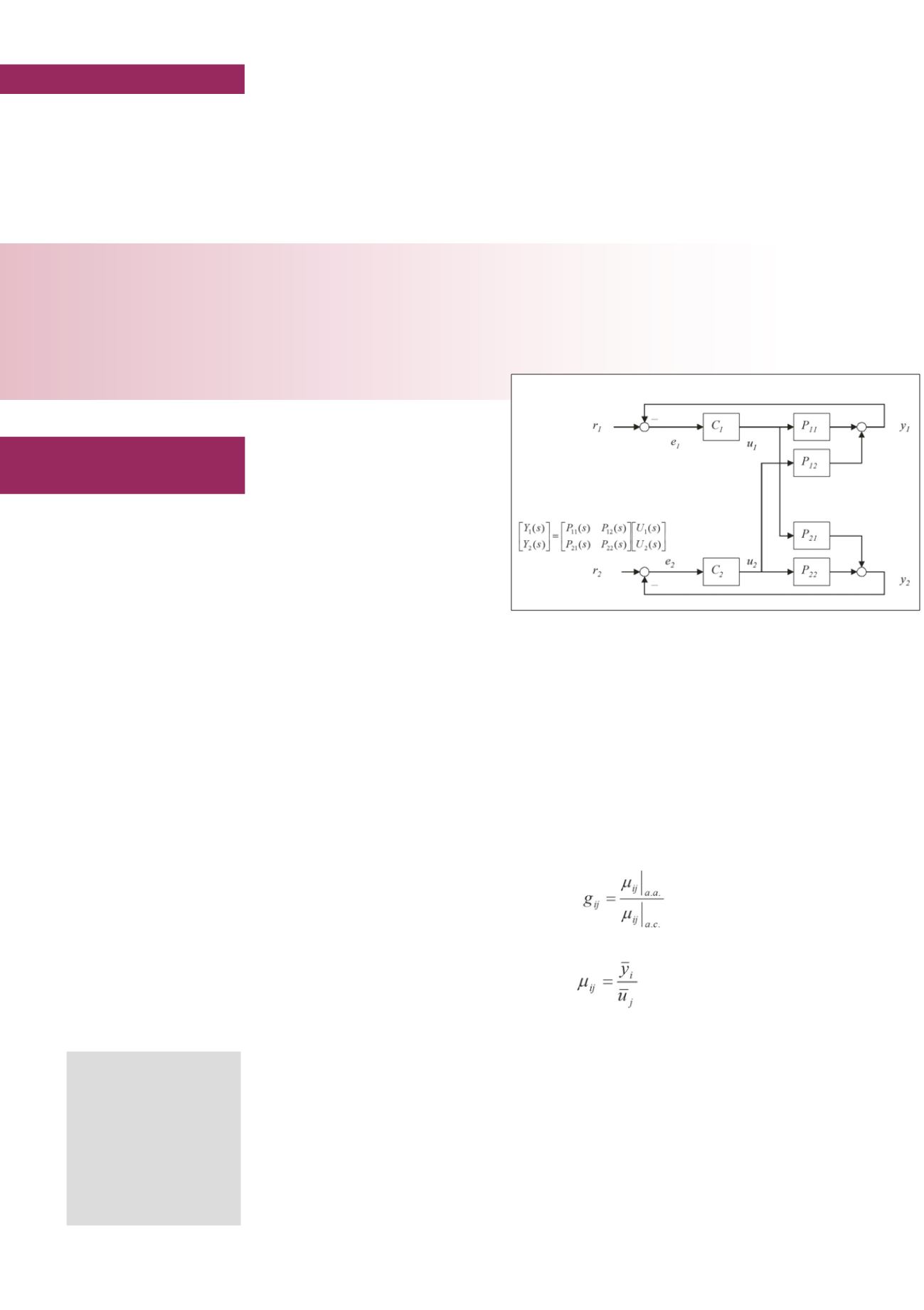
suo indice di colonna; la
►
figura 1
si riferisce al
semplice caso 2x2.
Il sistema può essere controllabile se la matrice
dei guadagni stazionari risulta invertibile.
Una misura della necessità di ricorrere a schemi
di controllo multivariabile è rappresentata dalla
rilevanza della cosiddetta “matrice dei guadagli
relativi”, i cui elementi sono
ove
è il guadagno in anello aperto tra la
j-esima
varia-
bile di controllo e la
i-esima
variabile da con-
trollare con gli altri anelli aperti (suffisso
a.a.
) e
chiusi (suffisso
a.c.
). Nel caso in anello chiuso si
deve supporre che, tramite opportune azioni di
controllo, a seguito di una stessa variazione della
variabile di controllo
u
i
, tutte le uscite tranne
y
j
assumano a regime il valore che avevano prima
della variazione stessa. Una notevole proprietà
della matrice dei guadagni relativi, considerando
la quale la sua costruzione risulta significativa-
►
GLI AUTORI
Massimiliano Veronesi, Product
Manager, Process Control &
Safety Systems Yokogawa
Italia; Antonio Visioli,
Dipartimento di Ingegneria
Meccanica e Industriale,
University of Brescia
Figura 1 - Schema di controllo multivariabile