

















 41 / 116
41 / 116

controllo
approfondimenti
Automazione e Strumentazione
n
Ottobre 2015
41
PID agisce come regolatore di loop esterno, che controlla il
parametro fisico primario, l’altro funge da controller di loop
interno, in cui si legge l’uscita del controller di loop esterno
come set point.
L’implementazione di un regolatore digitale PID
Le architetture dei sistemi di acquisizione dati e controllo
che dispongono dei loro processori DSP sono particolar-
mente adatte per l’impiego in applicazioni PID. In alcune
altre configurazioni non è raro vedere fino a 50 ms di tempi
di risposta, che spesso non costituiscono una prestazione
sufficiente per mantenere il livello di controllo richiesto nei
processi industriali o in applicazioni di ricerca. Al contra-
rio, i sistemi con processori DSP interni sono in grado di
avere tempi di risposta di ordine inferiore al microsecondo
controllando una varietà di I/O. Un regolatore PID digitale
può supportare diversi tipi di I/O che vanno da convertitori
analogico-digitale (ADC, per esempio a 16 bit), convertitori
digitale-analogico (DAC), ingressi digitali (TTL, encoder
quadratura, PWM) e uscite digitali. Gli ingressi analogici o
digitali sono usati per monitorare continuamente il processo,
mentre il processore calcola l’errore tra l’uscita e il set point.
I moduli di ingresso sono a disposizione per ospitare tipi di
sensori quali termocoppie e PTDS. Per le condizioni alta-
mente ottimizzate, alcuni modelli hardware sono in grado di
acquisire i dati a velocità superiori al MHz e dispongono di
sistemi flessibili che consentono misure parallele con cam-
pionamento sincronizzato sugli input analogici e digitali.
Conclusioni
I sistemi moderni di controllo di processo non potrebbero
esistere senza regolatori PID. Ognuna delle modalità di
controllo proporzionale, integrale e derivativo svolge una
funzione unica e le regole di taratura garantiscono il
con-
trollo di processo efficace
per numerosissimi tipi di cicli e
applicazioni.
Proprio come la tecnologia di controllo computerizzata
continua ad espandersi, così è prevedibile che il controllo
adattativo continuerà ad essere sempre più diffuso. Le pos-
sibilità di ciò che un sistema del genere può fare sembrano
quasi illimitate ed è prevedibile che, accanto ai sistemi di
controllo più sofisticati che spesso richiedono ingenti risorse
per lo sviluppo e per l’implementazione, ci sarà sempre
spazio per dispositivi e algoritmi basati sul controllo PID,
grazie alle sue riconosciute caratteristiche di semplicità, ver-
satilità e robustezza.
n
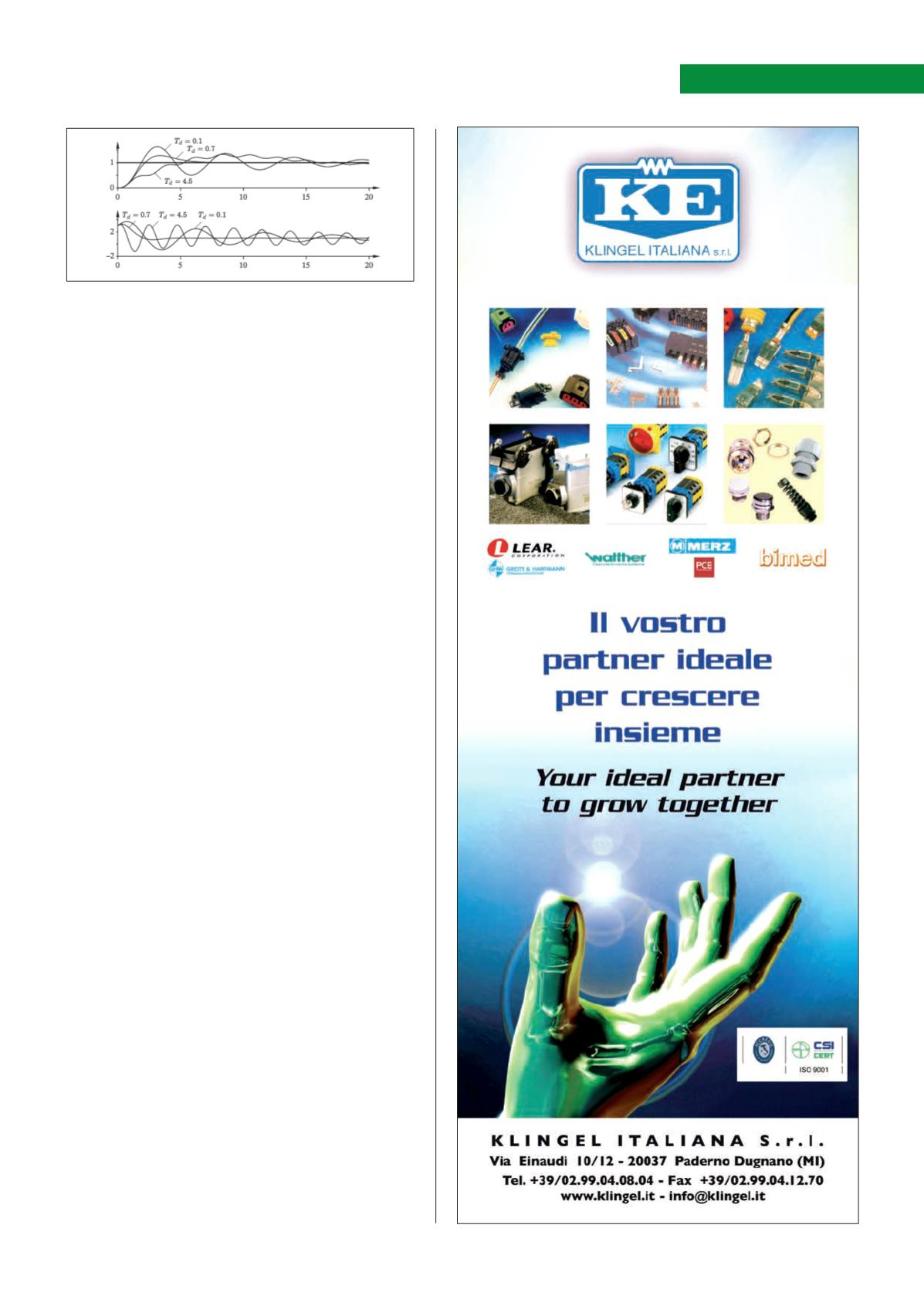
Figura 5 - Simulazione di un sistema close-loop PID al variare del solo
parametro derivativo