

















 38 / 116
38 / 116

controllo
approfondimenti
Ottobre 2015
n
Automazione e Strumentazione
38
La progettazione dell’
anello di controllo
inizia
con la definizione dei requisiti di prestazione,
misurati attraverso la risposta della
variabile di
processo
applicando una variazione a gradino
del
setpoint
. I regolatori industriali che utilizzano
questa tecnica sono usati per controllare processi
come quelli presenti in impianti chimici, quelli
per il controllo della temperatura e per certe appli-
cazioni automobilistiche. Lo scopo di un control-
lore è di compensare gli effetti dei disturbi sulle
variabili di processo e per portare una variabile
a seguire l’andamento di un setpoint desiderato.
Mentre questi regolatori possono essere costruiti
con circuiti analogici, l’implementazione utiliz-
zando un controller digitale offre una maggiore
flessibilità nella regolazione dell’algoritmo di
controllo e nella messa a punto dei parametri ope-
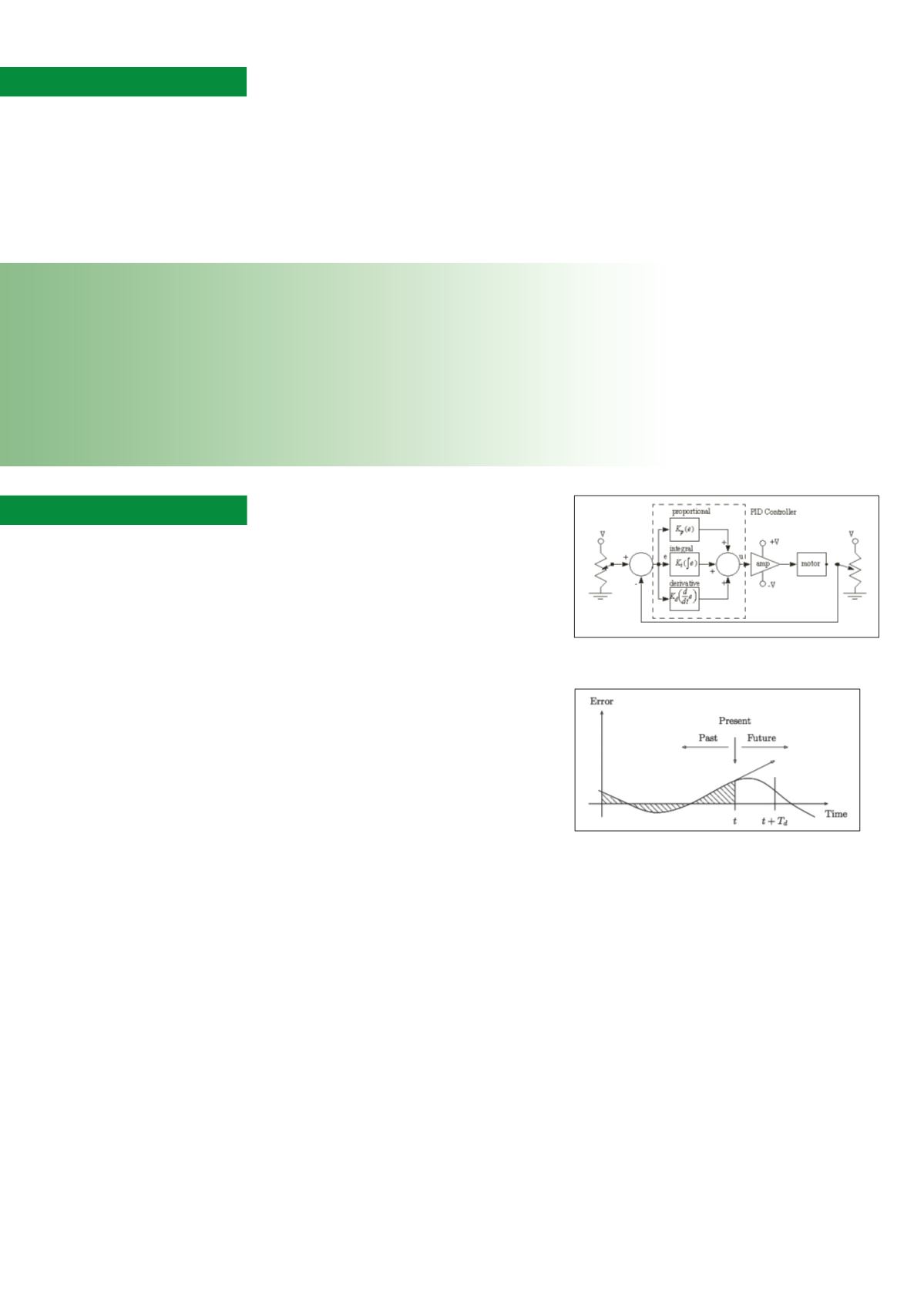
rativi. Il regolatore PID (
►
figura 1 e 2
) misura
l’uscita di processo e calcola la differenza (errore)
tra ciò che viene misurato e il set point
. Se esi-
ste un errore, il controllore regola la sua uscita al
fine di alterare il processo per avvicinarlo al punto
desiderato, minimizzando così l’errore. Tuttavia,
ogni volta che viene calcolato un errore, il rego-
latore deve decidere quanto alterare il processo.
Se il regolatore è troppo aggressivo, può generare
oscillazioni indesiderate (finanche all’instabilità).
Al contrario, se il controllo non è abbastanza
aggressivo, il sistema complessivo può essere
troppo lento. Le caratteristiche di risposta del con-
troller sono determinate dalle costanti PID (Pro-
porzionale, Integrale e Derivativo). La costante
proporzionale viene moltiplicata per l’errore. La
parte integrale, invece, corregge lo scostamento
tra il set point e la variabile di processo finché l’er-
rore non smette di variare. La costante derivativa,
infine, determina la velocità con cui il controllore
reagisce alla tendenza della variabile di processo.
Il mercato
I sistemi PID forniscono a tecnici ed ingegneri un
modo personalizzato per controllare una varietà
di parametri, dalla temperatura alla velocità e
molte delle variabili chimico/fisiche che descri-
vono il processo da controllare. Particolarmente
importante è il software di progettazione (per
esempio Matlab&Simulink, Labview) che per-
mette di eseguire calcoli e le simulazioni per faci-
litare il design dei PID (
►
figura 3
). Il mercato
offre numerosi hardware con differenti fattori di
forma, processori e I/O con cui creare un sistema
di controllo basato su PID. Questi includono
sistemi esterni con le schede plug-in, sistemi
stand-alone per il funzionamento indipendente da
PC e sistemi modulari per una espansione fles-
sibile.
►
Figura 1 - Layout di un controllore PID
Una panoramica sui controllori PID
Maurizio Di Paolo Emilio
Il sistema di controllo proporzionale-integrale-derivativo (PID) è l’algoritmo
più utilizzato ed è stato universalmente accettato nel controllo industriale. La
popolarità dei controllori PID può essere attribuita in parte alla loro robusta
prestazione in un’ampia gamma di condizioni operative e in parte alla
semplicità funzionale, che consente agli ingegneri di impiegarli in un modo
semplice e diretto. Come suggerisce il nome, PID, consiste di tre coefficienti
di base: proporzionale, integrale e derivativo che sono scelti per ottenere
una risposta ottimale.
Il sistema di retroazione più comune nel controllo industriale
Figura 2 - Il regolatore PID effettua il controllo di errori su
eventi presenti, passati e futuri