

















 40 / 116
40 / 116

controllo
approfondimenti
Ottobre 2015
n
Automazione e Strumentazione
40
Al giorno d’oggi, questi approcci di controllo
convenzionali sono ampiamente adottati nell’in-
dustria di processo e sono integrati in controllori
stand-alone, in controllori logici programmabili
(PLC) o direttamente nei computer di controllo
con versioni digitali delle funzioni PID originali.
Attualmente più circuiti di regolazione PID sono
implementati come algoritmi software nei dispo-
sitivi digitali. Un PLC è solo un caso particolare
di tali dispositivi; si possono avere uno o più PID
in esecuzione in un PLC, o in un PC industriale, o
in un SOC, system-on-chip, come i microcontrol-
lori ARM, oppure in Arduino, Raspberry e altre
schede embedded con sistemi operativi real time
(
►
figura 4
).
In genere, il regolatore PID è una parte essen-
ziale dell’anello di controllo nell’
industria di
processo
. Ma, oltre che nei moderni sistemi di
controllo distribuito (DCS), ha un
ampio insieme
di campi applicativi
, compreso quello dell’au-
tomotive con i sistemi Cruise Control, che per-
mettono di gestire la velocità del veicolo in base
ai comandi inviati dal conducente. Secondo il
segnale di comando inviato dal guidatore e il
segnale di retroazione inviato dal sensore di
velocità, il controllore regola la velocità del vei-
colo modificando a sua volta l’azionamento del
motore. Un regolatore PID permette di imple-
mentare questo controllo adattativo ed è utilizzato
dalle principali case automobilistiche.
L’emergere di IC programmabili e riconfigurabili
dinamicamente ha aggiunto ulteriori opzioni per
i progettisti di regolatori PID. Il Field Program-
mable Analog Array (FPAA) è adatto per
il controllo dei processi perché può essere
parzialmente riprogrammato da un proces-
sore di qualsiasi genere nel giro di pochi
microsecondi. La capacità di un disposi-
tivo FPAA di essere riprogrammato “al
volo” lo rende particolarmente adatto per il
controllo adattativo.
Gli algoritmi PID sono utilizzati anche
nell’ambito dei sistemi micro-elettro-
meccanici (MEMS) in una nuova genera-
zione di applicazioni di controllo motori
in automazione industriale, nella robotica (nel
settore civile, militare e aeronautico) e nell’in-
dustria automobilistica. Inoltre, gli sviluppatori
stanno pensando all’uso di algoritmi PID in mec-
catronica, basati su MEMS, in applicazioni di
consumo (giochi) e smartphone di nuova gene-
razione, in cui è possibile utilizzare i sensori di
movimento e le agli altri micro-dispositivi basati
sulla tecnologia MEMS che stanno diventando
comuni.
Caratteristiche di un PID control
Il vantaggio del regolatore PID è la fattibilità e
la
facilità di implementazione
. I parametri PID
possono essere progettati in base ai parametri del
processo da tenere sotto controllo, che pos-
sono essere stimati con precisione. Tuttavia,
il regolatore PID, generalmente, deve equili-
brare tutti e tre i parametri, trovando il giusto
compromesso tra le varie prestazioni (transi-
tori rapidi, scarse sovraelongazioni ed oscil-
lazioni, robustezza). Se i parametri di sistema
non possono essere stimati o ricavati con
precisione, i parametri progettati non pos-
sono tollerare incertezze e disturbi e quindi
presentano una bassa robustezza.
Un problema affrontato con i controller PID
è la loro linearità. Pertanto, le prestazioni dei con-
trollori PID in sistemi non lineari (ad esempio i
sistemi HVAC) sono variabili. Spesso, i regola-
tori PID sono resi più efficaci attraverso metodi
come il controllo automatico del guadagno o la
logica fuzzy.
La più grande variazione tra i controller di diversi
produttori è il loro modo di gestire l’azione deri-
vativa (
►
figura 5
). Su alcuni controller l’azione
derivativa lavora sulla variazione del setpoint
e differenze sostanziali sono dovute ai diversi
metodi di filtraggio.
Un vantaggio distintivo di regolatori PID è che
due regolatori PID possono essere utilizzati
insieme
per produrre migliori prestazioni dinami-
che. Questo si chiama cascade PID. Nel controllo
a cascata ci sono due PID organizzati in modo che
uno controlla il set point dell’altro. Un controllore
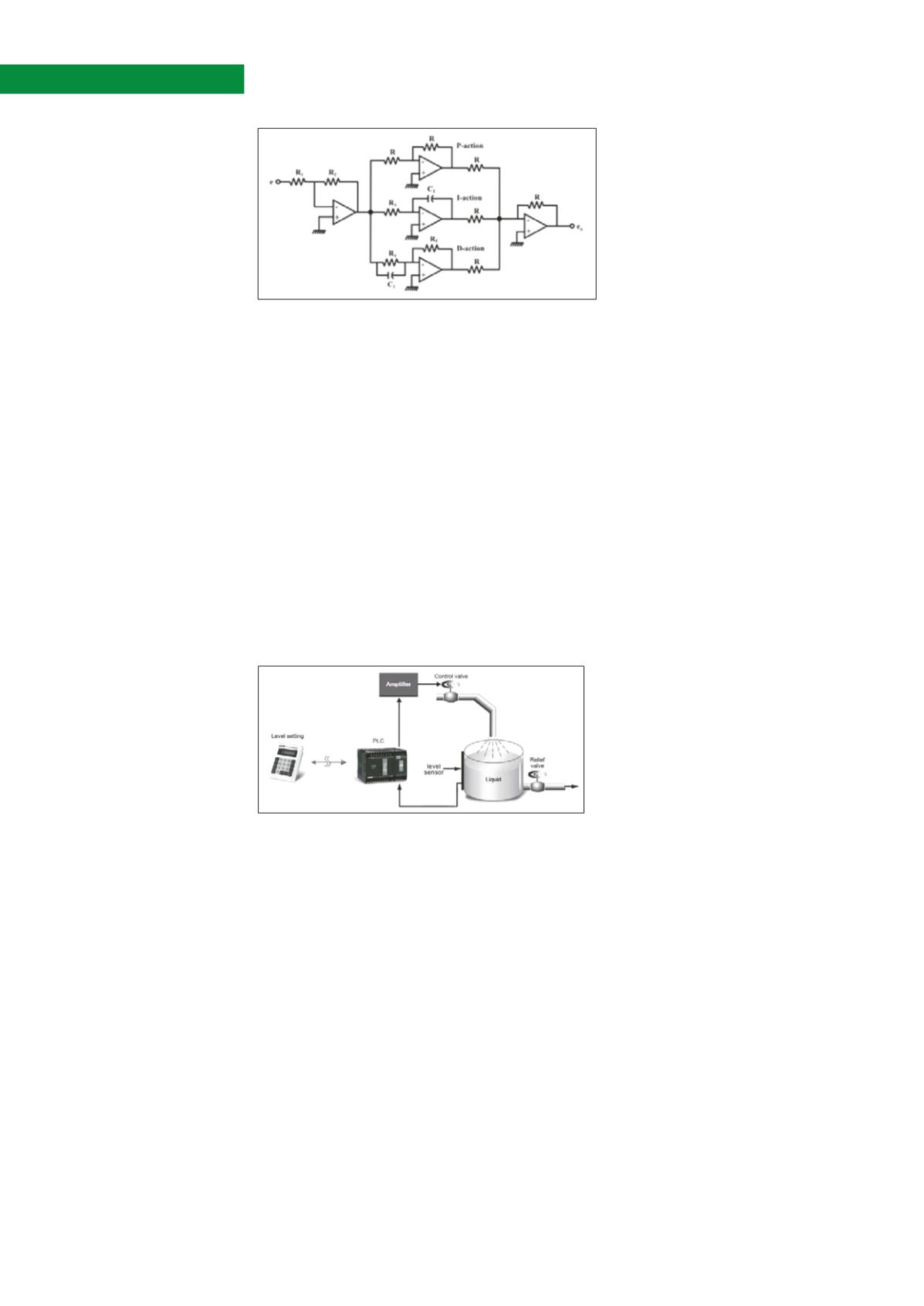
Figura 4 - Un esempio di controllore PID implementato in un
sistema PLC
Figura 3 - Controller PID elettronico