TEST & MEASUREMENT
approfondimenti
Luglio/Agosto 2014
■
Automazione e Strumentazione
54
Il bus CAN differenziale, utilizzato su pratica-
mente tutte le automobili moderne per il con-
trollo del sistema di trazione e di numerose
altre funzioni all’interno dell’abitacolo, si basa
sulla trasmissione asincrona di pacchetti di
dati da parte di più nodi che fanno parte della
rete. A causa della natura asincrona della tra-
smissione dei pacchetti, si hanno spesso delle
collisioni quando due o più nodi iniziano la tra-
smissione nello stesso momento… o quasi nello
stesso momento. Quando si verificano queste
collisioni – seppure in presenza di una proce-
dura di arbitraggio (arbitration) a livello di bit
(bitwise) che determina quale messaggio CAN
ha la massima priorità nella trasmissione dei
dati –
la trasmissione dei messaggi a minore
priorità può venire ritardata
. Possono inoltre
verificarsi errori sul bus CAN che dipendono dal
carico del bus, nonché dalla relativa frequenza di
occorrenza delle collisioni. Questo
articolo discute e illustra quanto
segue:
- analisi della procedura di arbi-
traggio a livello di bit del bus
CAN;
- come identificare agevolmente
su un oscilloscopio i messaggi
CAN decodificati simbolicamente,
compreso l’arbitraggio, utilizzando
un’elevata frequenza di aggiorna-
mento della forma d’onda;
- come sincronizzare l’oscillosco-
pio sui messaggi CAN che comprendono l’arbi-
traggio combinando il trigger sui messaggi sim-
bolici con il trigger a zona;
- come determinare la frequenza di occorrenza
dei messaggi CAN arbitraggio utilizzando l’ac-
quisizione a memoria segmentata di un oscillo-
scopio con la decodifica simbolica CAN-dbc e
la marcatura temporale.
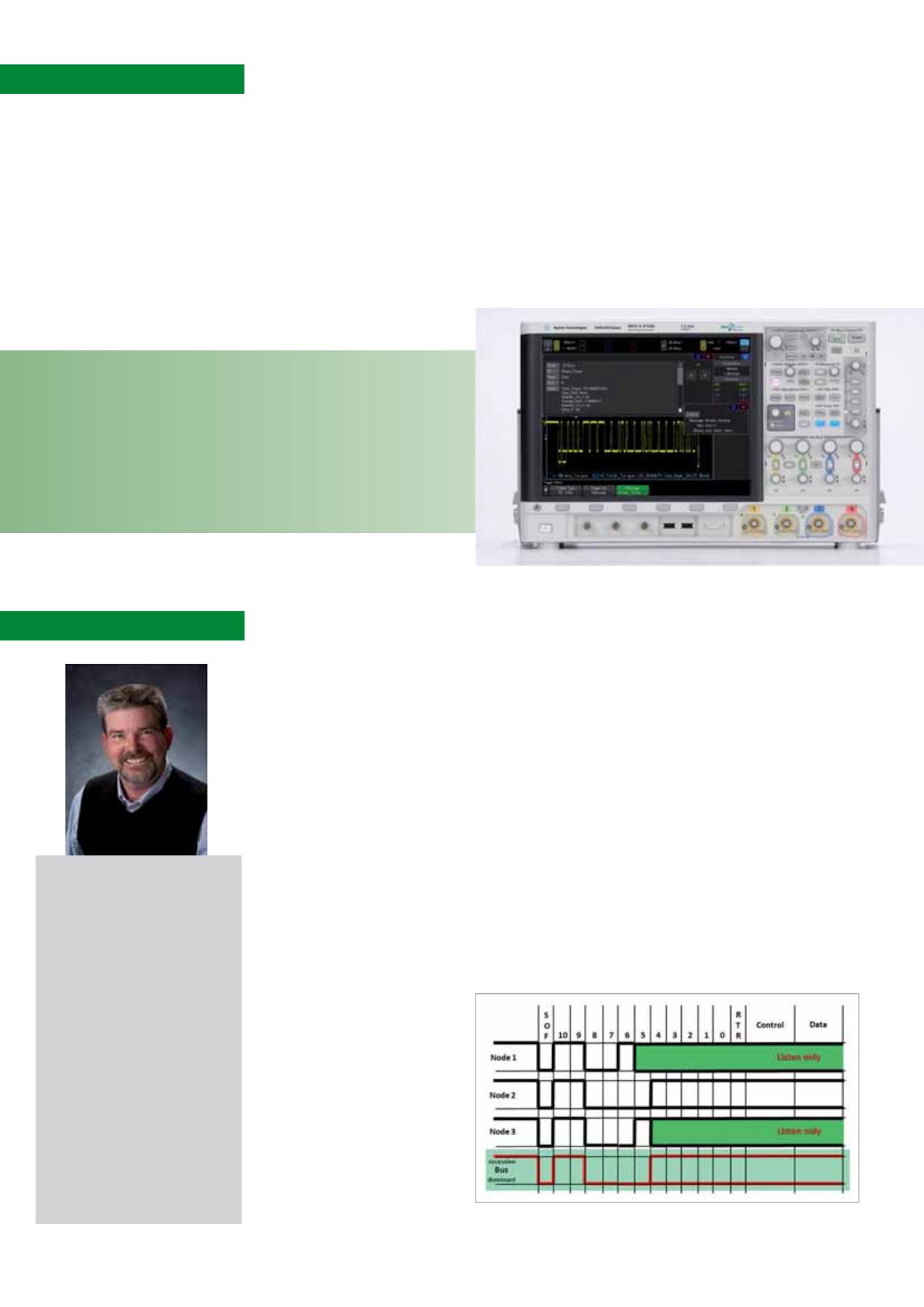
Arbitraggio a livello di bit
La
υ
figura 1
illustra come agisce la procedura
di arbitraggio a livello di bit per determinare il
frame trasmesso a più alta priorità e che può
continuare a trasmettere bit quando due o più
frame iniziano a trasmettere dati più o meno
nello stesso istante. Il bus CAN differenziale si
comporta essenzialmente come una rete logica
a “AND cablato” se monitorato/visualizzato nel
formato a bit dominante.
Un oscilloscopio per analizzare
l’arbitraggio CAN
Johnnie Hancock
CARATTERIZZARE LA PROCEDURA DI ARBITRAGGIO SUL BUS CAN TRAMITE UN OSCILLOSCOPIO
Figura 1 - Arbitraggio a livello di bit
In questo articolo si illustrano alcune nuove tecniche
di misura utili per collaudare applicazioni in
ambito automotive. La soluzione proposta sfrutta le
funzionalità di misura avanzate di un oscilloscopio
per caratterizzare la frequenza di occorrenza
delle procedure di arbitraggio sul bus CAN di uno
specifico frame/messaggio.
L’ AUTORE
J. Hancock, Agilent Technologies, è un
Product Manager della divisione Oscillo-
scope Products di Agilent Technologies. Ha
iniziato a lavorare in Hewlett-Packard nel
1979 come progettista hardware di sistemi
embedded e ha ottenuto un brevetto sulla
taratura degli amplificatori per oscilloscopi
digitali. Johnnie è attualmente responsa-
bile mondiale delle attività di supporto per
promuovere gli oscilloscopi digitali di Agilent
e regolarmente presenta le sue relazioni in
occasione delle principali conferenze tecni-
che mondiali. Johnnie si è laureato in inge-
gneria elettrica alla University of South Flo-
rida. Durante il suo tempo libero, apprezza
la compagnia dei suoi quattro nipoti e
restaurare la sua casa vittoriana vecchia di
cent’anni situata a Colorado Springs.


