
















 54 / 100
54 / 100

Giugno/Luglio 2016
Automazione e Strumentazione
ACQUA
applicazioni
54
detta
Ballasting
, i cassoni subiscono operazioni
differenti a seconda che si tratti di spalla o soglia.
Per quest’ultimo tipo, le operazioni sono più
semplici, il cassone viene rimorchiato e posi-
zionato nella zona di affondamento solo da ri-
morchiatori. A seguire, iniziano le operazioni di
Ballasting e qui entra in gioco
il sistema auto-
matico di supervisione Movicon 11
che ha lo
scopo di riempire i vari Clusters, e controllare
che l’assetto del cassone rimanga sempre in po-
sizione orizzontale, ovvero ‘in bolla’. Il Pontone
2 dedicato al Ballasting dei cassoni di soglia è
allestito con una batteria silos per l’iniezione del
cemento di zavorramento nei Clusters. Il sistema
di supervisione gestisce anche il controllo di as-
setto del Pontone stesso con un principio analogo
a quello di Ballasting. Il Pontone è infatti dotato
di casse di zavorramento che vengono svuotate o
riempite a seconda della variazione di assetto a
bordo. Lo svuotamento o riempimento dei silos
di cemento provoca infatti notevoli variazioni
del peso applicato e quindi variazioni di assetto
che, se non compensate, potrebbero in casi estre-
mi provocare il capovolgimento del pontone.
Per quanto riguarda i cassoni di soglia e quindi
il Pontone 1, le operazioni sono
più numerose
e complesse
. In questo caso il Cassone è sem-
pre dotato di Clusters, zavorrati quanto basta
perché non possa galleggiare da solo ma bensì
attraverso il sostegno degli argani allestiti a
bordo. Questo permette di calare il Cassone
tramite Argani e non con la tecnica del Balla-
sting. Il motivo sta nel fatto che devono essere
posizionati e calati con estrema precisione
+/- 25 mm di tolleranza di posizionamento.
Si tratta quindi di un sottile gioco di
pesi ed
equilibri
applicato però a Cassoni di enormi
dimensioni e masse.
La vera opera di ingegneria hi-tech, consiste
nella posa del secondo cassone, in cui il sistema
di posizionamento è supervisionato in teleme-
tria sia a bordo che da remoto dagli uffici di
Treviso, con Movicon 11. Il sistema utilizzato
è denominato Posizionamento Dinamico ad
Argani ed è l’unico in Italia.
L’architettura del sistema
Eureka System ha progettato, sviluppato e
fornito il sistema di controllo dei due pon-
toni dotandolo di
supervisione basata su
Scada Movicon 11.4
, composto da
un server
e tre client
installati su sistema Hypervisor
VMware Vsphere 5 + VMware con Horizon-
View + Domain-Controller Win Server 2008
R2 64bit e rispettive macchine virtuali con
S.O. Win7Pro a 64 bit.
In particolare il
Pontone 1
è il sistema più
complesso poiché è dotato di
cinque postazioni
locali HMI di comando e controllo
, basate su
Monitor Zero-Client collegate all’ Hypervisor
tramite protocollo PCoIP e due Video-Wall con
matrice 2 x 2 display da 46 pollici ciascuno e le
schermate di supervisione in Screen-Mirroring
delle postazioni HMI. Nel centro di coordina-
mento delle operazioni all’isola della Pellestrina
è collocato un Video-Wall 3 x 3 con display da
46 pollici ciascuno, dedicato alla Screen-Mir-
roring delle postazioni HMI e collegato tramite
rete Wi-Fi lagunare. Inoltre è possibile accedere
da remoto tramite VPN e connessione Internet
con scheda telefonica 4G.
Vantaggi della soluzione
La virtualizzazione di tutta l’infrastruttura
ICT della Control-Room ha permesso di cre-
are
un sistema di comando e controllo con
le stazioni Front-End completamente Har-
dware-Free
, gestibile centralmente a livello
di Backup, System-Upgrading, Teleassistenza
remota, UPS.
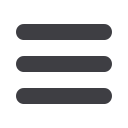
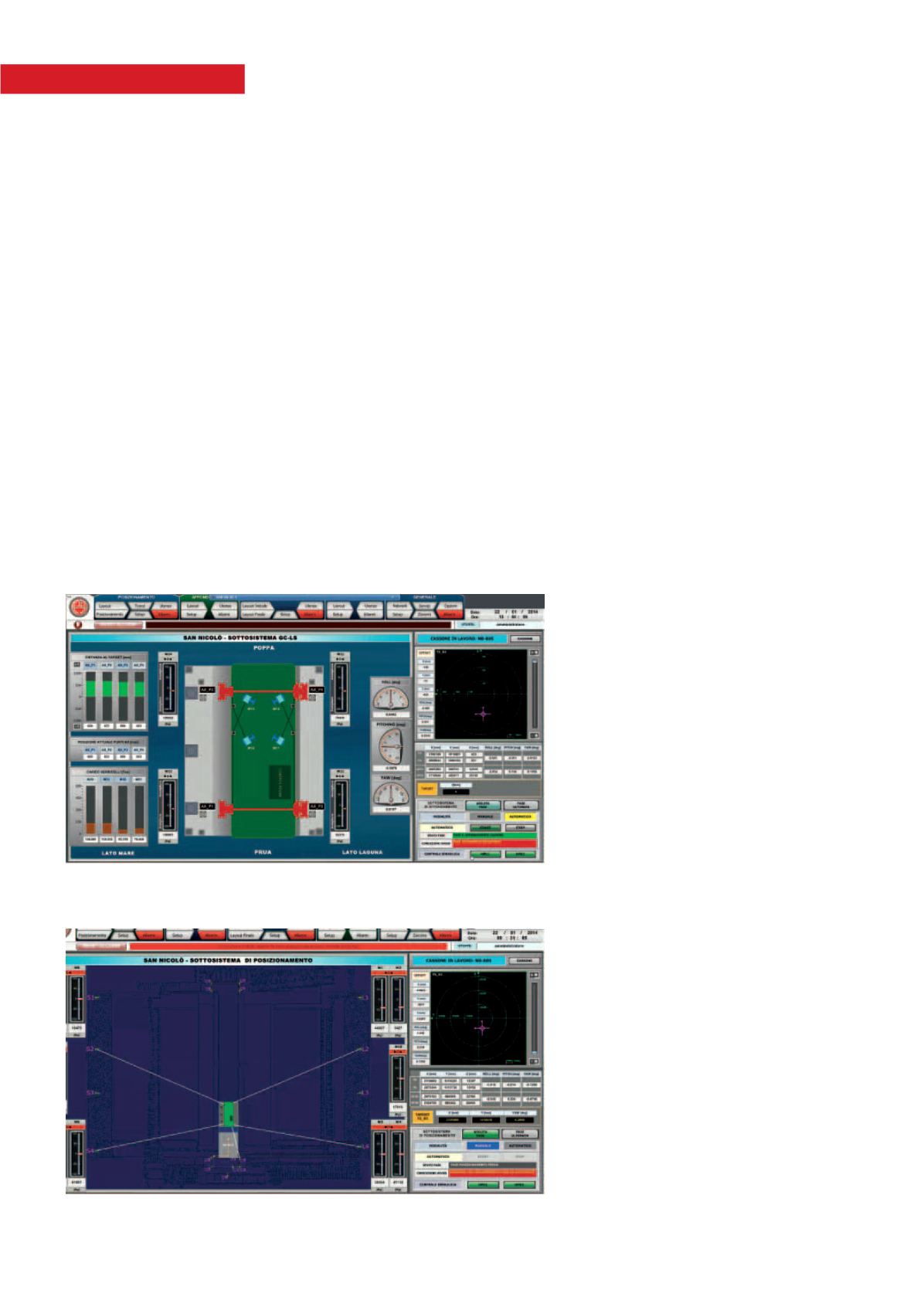
Con il software Movicon è stato sviluppato il sistema di controllo per l’automazione
della posa dei cassoni del Progetto Mose per le bocche di Lido San Nicolò e Malamocco
Schermata del sistema di posizionamento dinamico dei cassoni