MECCATRONICA
approfondimenti
Automazione e Strumentazione
■
Gennaio/Febbraio 2014
53
nications Interface).
Nella figura 1 si riporta lo schema di principio
del progetto “Flap-Actuator” completo dei due
dimostratori gemelli utilizzati per simulare i due
pannelli flap dell’aeromobile.
Il dimostratore è formato da una sezione idraulica
e da una sezione elettrica:
- La sezione idraulica è costituita da un sistema
pompa-pistone utilizzato per simulare l’effetto
dell’attrito dell’aria sui flap e viene controllato
tramite una traiettoria di forza direttamente dal
PC-Banco.
- La sezione elettrica è costituita dal quadro
alimentazione-idraulica e dall’armadio aziona-
mento in cui sono installati i due inverter Fault
Tolerant e la ECU.
Nella figura 2 si riporta lo schema di principio
della sezione elettrica in cui sono evidenziate le
informazioni di controllo e diagnostica scambiate
tra i vari dispositivi che la compongono.
La ECU, principale attività di tesi, è una scheda di
controllo multiprocessore che fa da interfaccia tra
il PC-Banco e il sistema di attuazione. Dispone
di due microcontrollori Texas Instruments della
famiglia C2000 operanti a 100 MHz, le principali
funzioni svolte sono:
- Calcolo della traiettoria di posizionamento e
velocità a partire dai parametri di movimenta-
zione inviati dal PC-Banco tramite interfaccia
seriale RS-232;
- Controllo di coerenza dei sensori di posizione
ridondanti per escludere guasti ed evitare
fenomeni di disallineamento tra i due attuatori
durante la movimentazione del pannello flap;
- Lettura dei sensori di posizione ridondanti:
Resolver
- fornisce la posizione assoluta del
rotore dell’attuatore;
Encoder multigiro
- misura
la posizione assoluta del pannello dall’attuatore
(quest’informazione viene utilizzata in fase di
inizializzazione del dimostratore).
- Gestione delle comunicazioni ad alta velocità
SPI.
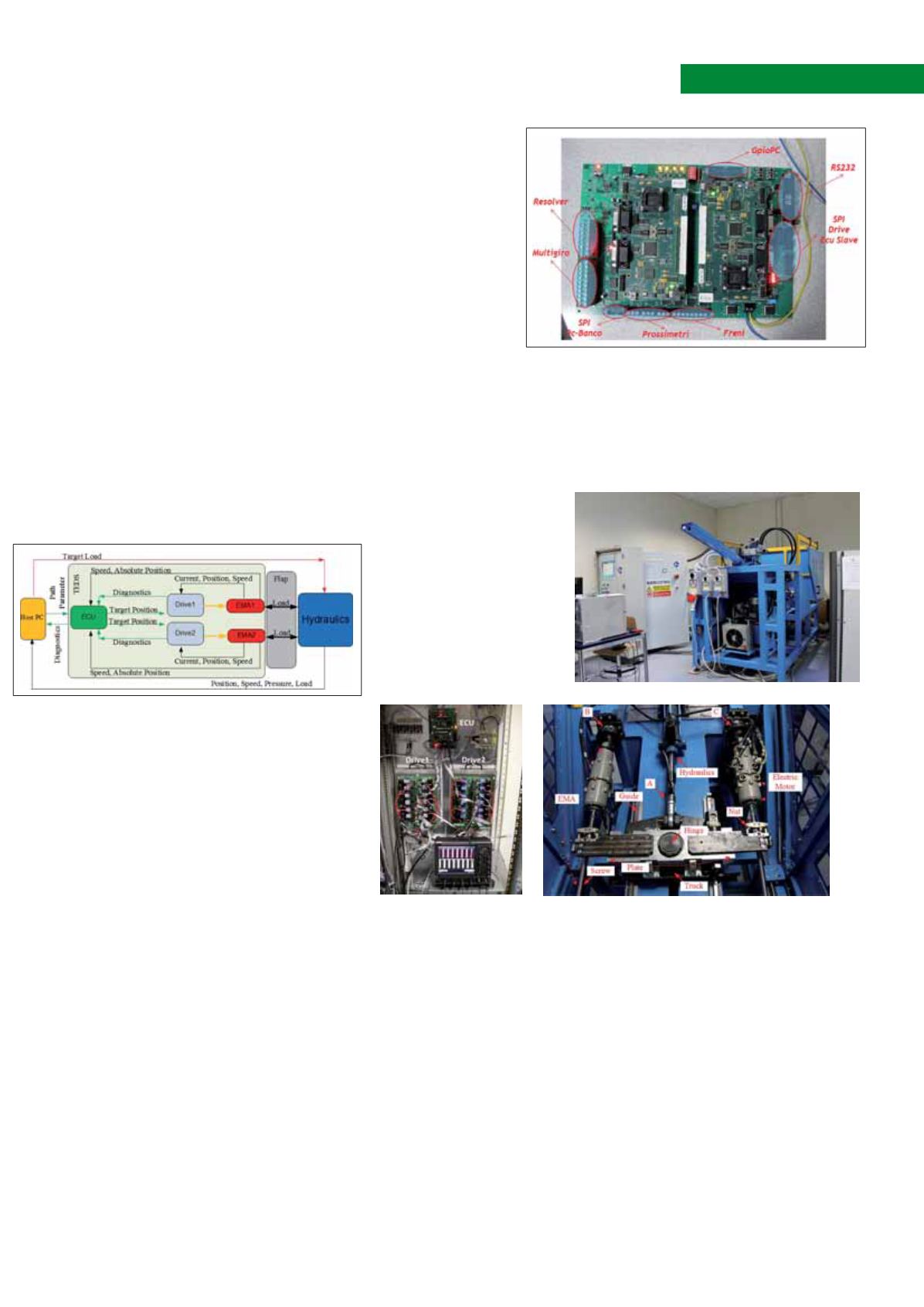
Nella figura 3 è riportata la foto dettagliata (porte
sensori e comunicazione) del prototipo della ECU.
Risultati
Sul sistema com-
pleto (figura 4), sono
stati effettuati i test di
movimentazione con
applicazione del carico
meccanico da parte del
sistema idraulico. Si è
potuto osservare come
i due attuatori riescano
ad inseguire la traietto-
ria di posizionamento
inviata dalla ECU sia nelle condizioni di funzio-
namento nominale e sia nelle condizioni di guasto
su una o due fasi. I risultati ottenuti hanno dimo-
strato come il disallineamento tra i due attuatori,
anche nelle condizioni di prova peggiori (due fasi
guaste su entrambi gli attuatori), rimanga del tutto
accettabile.
Infine nella figura 5 si riportano
due particolari dell’armadio in
cui sono installati gli inverter
polifase e la ECU e un partico-
lare della parte idraulica.
Il lavoro svolto ha portato alla
pubblicazione di due articoli
scientifici presentati in confe-
renze internazionali,
[1] [2]
.
Riferimenti
[1]
M. Tursini, G. Fabri, E. Della Loggia, M.
Villani, “Parallel Positioning of Twin EMAs for
Fault-Tolerant Flap Applications”,
Int. Conf. on
Electrical Systems for Aircraft, Railways, Ship
Propulsion and Road Vehicles
(ESARS 2012),
Bologna, 16-18 October 2012. IEEE Catalog
Number: CFP1292L-USB, ISBN: 978-1-4673-
1371-1.
[2]
G. Fabri, E. Della Loggia, M. Tursini, “DSP-
Based Electronic Control Unit for Fault-Tolerant
Double Drive Application”.
Proc. of the 5
th
Euro-
pean DSP in Education and Research Confer-
ence
(EDERC 2012), Amsterdam, 13-14 Septem-
ber, 2012, Published by Texas Instruments 2012.
SSQZ002 ISBN: 978-0-9573832-0-3.
■
Figura 3 - Prototipo della ECU
realizzata
Figura 2 - Schema di principio della sezione elettrica del
progetto “Flap-Actuator”
Figura 4 - Dimostratore tecnologico
completo
Figura 5 - L’armadio inverter (a) e
il particolare della sezione idraulica
del dimostratore (b)
a)
b)


