


















 107 / 118
107 / 118

APRILE 2015
AUTOMAZIONE OGGI 380
107
di tollerare l’interruzione o il cortocircuito di uno dei fili del bus.
La quarta parte delle specifiche ISO 11898 (Part 4 ‘Time-triggered
communication’) descrive una variante di CAN che implementa
un meccanismo di comunicazione a slot temporali (lo tratteremo
sommariamente più avanti).
La quinta e sesta parte, quest’ultima di introduzione relativa-
mente recente, si occupano di definire delle modalità di riduzione
dei consumi per quando il bus non è impegnato nel trasferimento
di dati (Part 5 ‘High-speed medium access unit with low-power
mode’) e un meccanismo di wake-up selettivo per la versione
high-speed (Part 6 ‘CAN High-speed medium access unit with
selective wake-up functionality’).
Esistono altri standard ISO che si occupano di CAN, come ISO
11992, che caratterizza le connessioni punto-punto della ver-
sione robusta a bassa velocità e che, in campo automotive, trova
applicazione nelle comunicazioni tra veicoli e rispettivi rimorchi.
Oppure come ISO 15765, che descrive uno standard per la dia-
gnostica di bordo che fa uso di CAN. Alcune diffuse implemen-
tazioni di CAN, per ovvi motivi rivolte al mercato automotive, si
trovano nelle specifiche di SAE.
Gli standard SAE J2284 (da 1 a 3) descrivono lo strato fisico per la
realizzazione di reti CAN a 125 kbps, 250 kbps e 500 kbps, mentre
SAE J2411 definisce lo standard CAN a un solo filo (single-wire
CAN), che opera alla velocità nominale di 33,3 kbps e la cui princi-
pale applicazione è nel collegamento dell’elettronica di comfort
a bordo degli autoveicoli.
La comunicazione avviene su un singolo cavo non schermato,
con l’ovvio ritorno di massa rappresentato dal telaio dell’autovet-
tura, e il protocollo contempla la possibilità di porre una parte dei
nodi in uno stato di sospensione (‘sleep’). Non si possono infine
non citare le specifiche J1939, pubblicate
da SAE nel 1998, che descrivono i protocolli
di livello superiore che permettono di re-
alizzare reti basate su CAN 2.0b nei veicoli
pesanti adibiti a lavori agricoli, costruzioni
e movimentazione materiali.
Variazioni sul tema
Nella sua incarnazione ‘storica’ CAN è carat-
terizzato da una comunicazione orientata
agli eventi, che non garantisce una ben defi-
nita latenza minima, e da un meccanismo di
arbitraggio non distruttivo, che si traduce in
una limitazione di velocità. Le due principali
varianti che hanno permesso di ovviare a
queste carenze sono note con il nome di TT-
CAN e CAN FD. TimeTriggered CAN, messo
a punto dai progettisti di Bosch e successivamente incorporato
nello standard ISO 11898-4, è un protocollo di livello superiore
che si appoggia agli strati di collegamento dati e fisico definiti
nelle parti 1, 2 e 3 dello standard. TT-CAN mette a disposizione
un meccanismo di comunicazione pianificata per mezzo di slot
temporali: le trasmissioni si susseguono a intervalli scanditi da un
clock comune (un messaggio di riferimento fornito da un dispo-
sitivo denominato ‘Time Master’), secondo un ordine predefinito
in una tabella di schedulazione.
Questamodalità di comunicazione si presta alle applicazioni in cui
il traffico dei dati è di natura ciclica, come nei controlli ad anello
chiuso; la predeterminazione dei tempi di latenza permette inol-
tre di migliorare le prestazioni in tempo reale delle reti CAN.
In un mondo che corre alla velocità di decine di Gbps, i bit rate
offerti da CAN possono sembrare anacronistici. In realtà, sono
più che adeguati per le applicazioni cui CAN è storicamente asso-
ciato, ossia il controllo di un numero limitato di dispositivi elettro-
meccanici per il passaggio di brevi messaggi su base prioritaria.
Con il crescere della complessità dei sistemi da controllare e con
il rafforzarsi della concorrenza di bus alternativi ad alta velocità, si
è manifestato il bisogno di una nuova evoluzione per CAN. CAN
FD (ossia ‘CAN with Flexible Data-rate’) utilizza alcuni bit riservati
per introdurre nel frame CAN standard un meccanismo per distin-
guere la fase di arbitraggio, in cui tutti i nodi possono intervenire,
da quella di scambio dati, in cui il canale può essere occupato dal
solo nodo trasmittente uscito vincitore dalla contesa.
Una volta terminato l’arbitraggio alla velocità ridotta, dettata
dalla necessità per tutti i nodi di confrontare la priorità dei propri
messaggi, il bus può passare alla modalità ad alta velocità. Per
mantenere la compatibilità con i transceiver tradizionali, CAN FD
permette la trasmissione alla velocità media di 2,5 Mbps. Valori
più elevati, fino a 12-15 Mbps, possono essere raggiunti utiliz-
zando transceiver di nuova generazione.
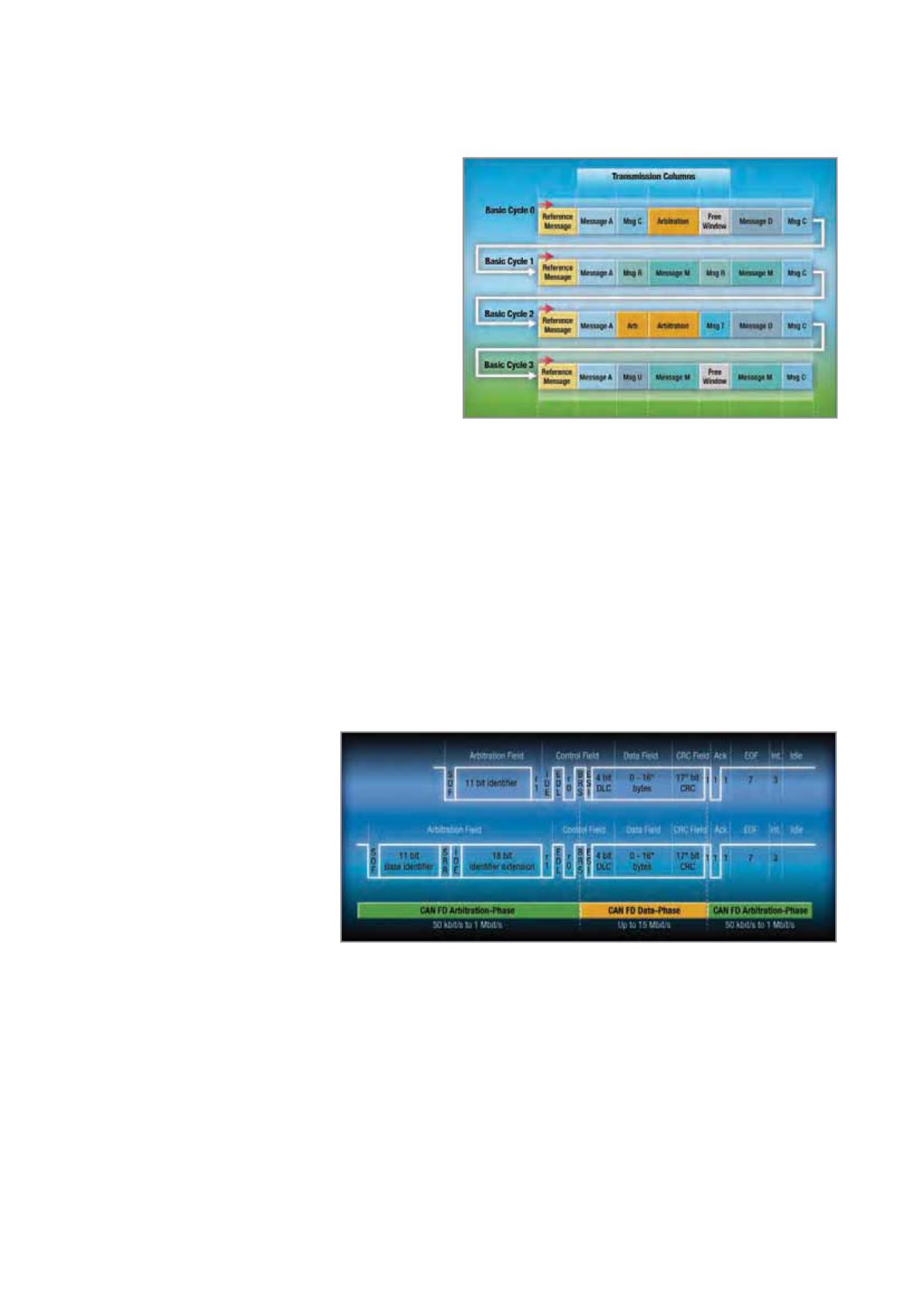
t
CAN FD distingue le fasi di arbitraggio da quelle di trasmissione dei dati,
permettendo di sfruttare al massimo la banda offerta da canale e transceiver in
quest’ultimo caso
TT CAN aggiunge alla comunicazione orientata agli eventi
tipica di CAN, un meccanismo di suddivisone in slot temporali
che si articolano in cicli con una latenza definita