Beckhoff: robotica, motion control e Plc su una piattaforma Pc
-

- Tweet
- Pin It
- Condividi per email
-
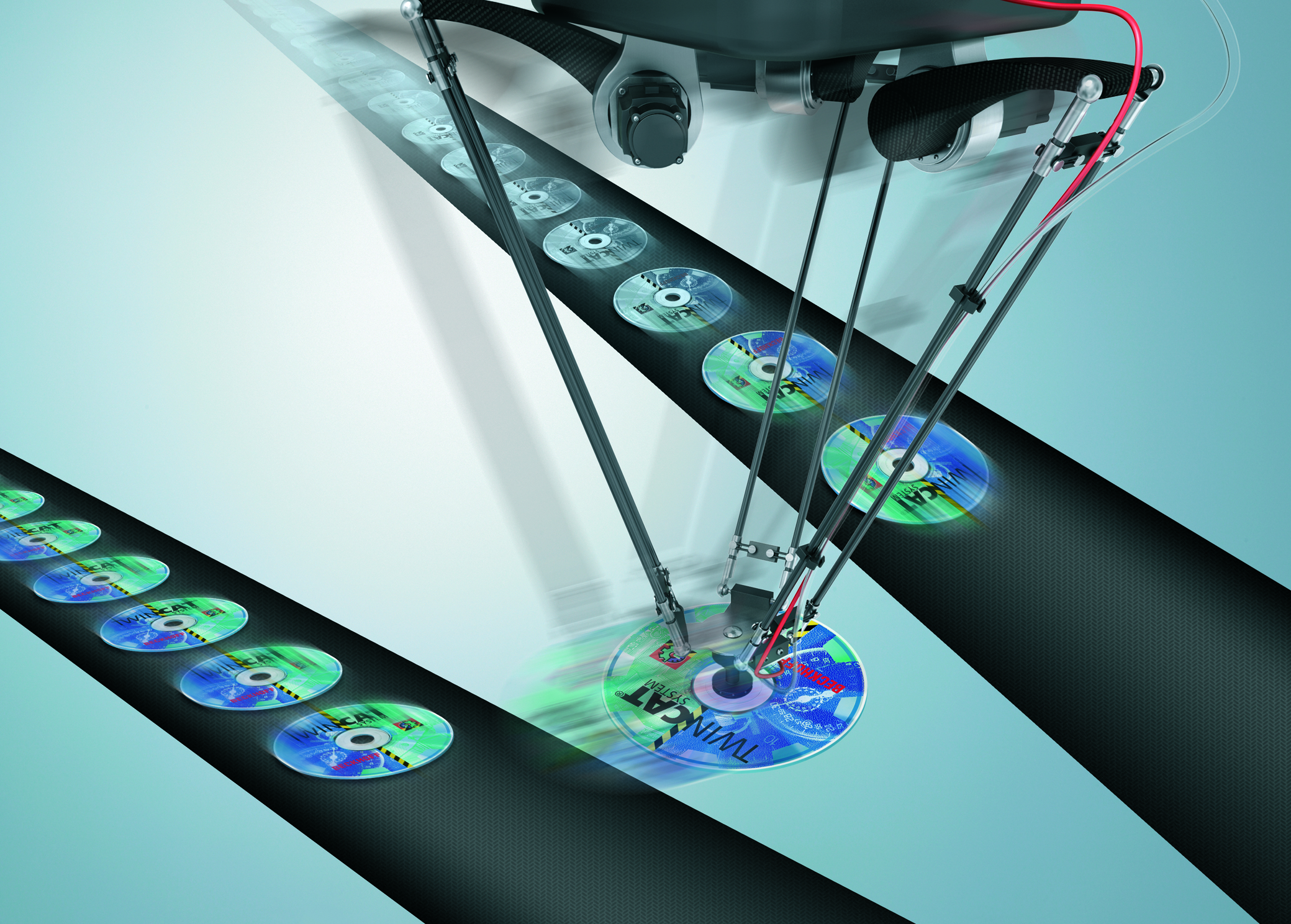
Il software di automazione TwinCAT ora consente anche l’integrazione di robot (cinematiche Delta, Scara) oltre all’interazione e sincronizzazione con le funzioni Motion Control esistenti. In questo modo l’intero sistema di controllo è perfettamente integrato e non occorrono Cpu aggiuntive per i robot. Il controllo basato su Pc pertanto riunisce in sé funzioni Plc, motion control e robotica su un’unica piattaforma hardware e software: una pietra miliare sulla strada verso la “Scientific Automation”.
Il software plug-in “TwinCAT Kinematic Transformation” (trasformazione cinematica) è un primo passo per l’integrazione del controllo robot nella suite di automazione TwinCAT. Le funzioni Plc, Motion Control, HMI e Robotica girano su un’unica Cpu. I vantaggi per l’utente sono evidenti:
– nessuna Cpu aggiuntiva per il controllo del robot;
– riduzione dei costi di engineering: un solo sistema, TwinCAT strumento noto e conforme a standard internazionali, per configurazione, parametrizzazione e diagnostica dell’intera applicazione;
– nessuna perdita qualitativa per l’interazione di Cpu diverse per Plc, motion control e robotica;
– incremento di prestazioni e precisione grazie a interfacce dirette; le usuali complesse comunicazioni fra le diverse Cpu non sono più necessarie.
TwinCAT Kinematic Transformation può essere integrato in modo trasparente nell’ambiente motion control esistente: la sincronizzazione delle funzioni di robotica e motion control è ottimale utilizzando TwinCAT NC PTP (posizionamento assi point-to-point) o NC I (interpolazione assi 3D). Tutte le proprietà NC come “camma elettronica” o “taglio al volo” (sincronizzazione di un asse slave con un asse master in movimento) possono essere combinate a piacere su una piattaforma hardware e software comune.
TwinCAT supporta diverse funzioni cinematiche parallele e seriali come quelle utilizzate per il pick-and-place. La programmazione delle coordinate di destinazione avviene comodamente nel sistema di coordinate cartesiane. La conversione alla relativa posizione del motore (trasformazione inversa) viene acquisita dal modulo cinematico. Inoltre si può calcolare il modello dinamico per il pre controllo della coppia.
Il sistema cinematico può essere selezionato comodamente nel TwinCAT System Manager, dove sono parametrizzate – oltre al tipo, ad esempio Delta – anche le lunghezze della leva e gli offset. Per un pilotaggio dinamico è possibile predefinire masse e relativa inerzie.
Con l’ausilio delle funzionalità “taglio al volo” e “camma elettronica” è possibile sincronizzare il robot sui nastri trasportatori per raccogliere o deporre pezzi. Queste applicazioni si ritrovano spesso nell’handling o nel packaging.
Beckhoff: www.beckhoff.it
Maggiori informazioni: www.beckhoff.it/TwinCAT
Contenuti correlati
-
 Un robot subacqueo controllato da IPC raccoglie rifiuti nei canali di Venezia
Un robot subacqueo controllato da IPC raccoglie rifiuti nei canali di VeneziaUn sistema di Beckhoff Automation, con servoazionamenti e sensori gestiti da un’architettura PC, controlla un robot per la pulizia dei fondali di Venezia. Grazie a GPS e navigazione inerziale, il sistema calcola la posizione in tempo reale...
-
 Cobot più collaborativi, facili all’uso ed ergonomici grazie alla Master Key di Idea Prototipi
Cobot più collaborativi, facili all’uso ed ergonomici grazie alla Master Key di Idea Prototipi“Grazie a queste macchine, in pratica, sta accadendo quella rivoluzione che ha investito le aziende con i PC: da strumenti tecnologici poco usabili e specifici per una singola funzione, i PC hanno migliorato il lavoro sotto ogni aspetto,...
-
 Un chiaro focus su cybersecurity e licensing software: Wibu-Systems ad Hannover Messe 2024
Un chiaro focus su cybersecurity e licensing software: Wibu-Systems ad Hannover Messe 2024Quest’anno, Wibu-Systems è particolarmente orgogliosa di presentare ad Hannover Messe 2024 una serie speciale di tour guidati, condotti da Oliver Winzenried stesso, CEO e fondatore dell’azienda. Questi viaggi unici nel cuore dell’innovazione industriale proporranno ai partecipanti uno...
-
 NSK partecipa allo sviluppo di una mano robotica altamente personalizzabile
NSK partecipa allo sviluppo di una mano robotica altamente personalizzabileNSK e il Centro Aerospaziale Tedesco (DLR, Deutsches Zentrum für Luft- und Raumfahrt) stanno sviluppando una mano robotica che aiuterà ad automatizzare attività manuali, in particolare nell’industria dei servizi. Il concetto ruota attorno a una mano robotica...
-
 Da Lika, encoder incrementale SME9 per applicazioni lineari e rotative
Da Lika, encoder incrementale SME9 per applicazioni lineari e rotativeL’ encoder incrementale ad alta velocità SME9 di Lika Electronic è perfetto per le esigenze di controllo del movimento in motori lineari e stampanti e offre un’accuratezza superiore a 10 µm a velocità elevate fino a 100 m/s....
-
 Omron presenta CS1: networking non-stop
Omron presenta CS1: networking non-stopL’unità di controllo CS1 di Omron accelera i processi nei siti di produzione, rispondendo a una varietà di applicazioni grazie a un design più semplice ed efficiente, a rinnovate capacità di sviluppo e manutenzione supportate da software e...
-
 Supply chain e trasparenza della filiera: la tecnologia aiuta ad aumentare del +90% l’accuratezza delle informazioni
Supply chain e trasparenza della filiera: la tecnologia aiuta ad aumentare del +90% l’accuratezza delle informazioniSecondo Remira Italia, azienda specializzata nell’offerta di soluzioni software avanzate per la gestione della supply chain, attraverso la tecnologia è possibile velocizzare del +20% la comunicazione con i fornitori e subfornitori e aumentare del +90% l’accuratezza delle informazioni....
-
 Modernizzare la tecnologia di produzione
Modernizzare la tecnologia di produzioneIntelligenza artificiale e soluzioni basate sul cloud per l’aggiornamento di software e sistemi di controllo presso lo stabilimento di produzione più grande d’Europa di un gigante del settore chimico Emerson è stata scelta dalla multinazionale chimica LyondellBasell...
-
 Il software sulla strada del riso
Il software sulla strada del risoCome risolvere in maniera semplice e innovativa le problematiche gestionali di un grande impianto dedicato alla lavorazione del riso come quello di S.P. SpA? Nel cuore del distretto risicolo vercellese, Atec Sistemi ha risposto a questa istanza...
-
 Un servizio clienti di livello superiore con Universal Robots
Un servizio clienti di livello superiore con Universal RobotsUniversal Robots offre ai propri clienti l’accesso a un nuovo servizio unico, gratuito, personalizzato, mettendo al loro servizio una nuova figura di consulente per semplificare l’implementazione dell’automazione: il customer success manager. Il Programma di Customer Success Progettato...
Scopri le novità scelte per te
-
Un robot subacqueo controllato da IPC raccoglie rifiuti nei canali di Venezia
Un sistema di Beckhoff Automation, con servoazionamenti e sensori gestiti da un’architettura PC, controlla un robot per...
-
Cobot più collaborativi, facili all’uso ed ergonomici grazie alla Master Key di Idea Prototipi
“Grazie a queste macchine, in pratica, sta accadendo quella rivoluzione che ha investito le aziende con i PC:...




Notizie Tutti ▶
-
 AEA apre al mondo dell’intelligenza artificiale nel percorso formativo
AEA apre al mondo dell’intelligenza artificiale nel percorso formativoI corsi specialistici di AEA – Aircraft Engineering Academy, l’accademia di formazione per tecnici manutentori...
-
 Crisi nel Mar Rosso: effetti sulle imprese italiane e sul commercio internazionale
Crisi nel Mar Rosso: effetti sulle imprese italiane e sul commercio internazionaleAllianz Trade ha pubblicato oggi un Rapporto dal titolo “La crisi nel Mar Rosso:...
-
 La Lombardia conferma per il 2024 la misura ‘Nuova Impresa’ a sostegno dell’imprenditorialità
La Lombardia conferma per il 2024 la misura ‘Nuova Impresa’ a sostegno dell’imprenditorialitàIn Lombardia negli ultimi 3 anni sono nate 2.180 nuove attività, tra imprese e...
Prodotti Tutti ▶
-
 Nuovo passacavo UT da icotek: pratico e innovativo
Nuovo passacavo UT da icotek: pratico e innovativoI nuovi passacavi UT di icotek sono una soluzione innovativa per il passaggio semplice...
-
 Azionamenti Nord DriveSystems per il trattamento delle acque reflue
Azionamenti Nord DriveSystems per il trattamento delle acque reflueDistribuzione di acqua potabile, trasporto di acque reflue, circolazione di fanghi attivi: pompe, sistemi...
-
 La nuova soluzione Emerson di attuatore motorizzato e valvola di arresto
La nuova soluzione Emerson di attuatore motorizzato e valvola di arrestoEmerson ha presentato la nuova soluzione di valvola di sicurezza e attuatore motorizzato ASCO Serie...


{kind=link}