Un sistema di controllo di UAV per telerilevamento
-

- Tweet
- Pin It
- Condividi per email
-

Dalla rivista:
Automazione e Strumentazione
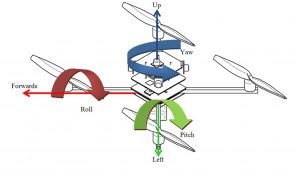
Il lavoro di ricerca ha avuto come obiettivo la progettazione e lo sviluppo di un sistema di controllo che permettesse la navigazione autonoma di un UAV (Unmanned aerial vehicle), comunemente chiamato ‘drone’, in un ambiente sconosciuto, per applicazioni nell’agricoltura di precisione. Nel caso specifico, si è preso, come modello di riferimento per le simulazioni, un quadrirotore.
Serena Pompeo
Contenuti correlati
-
 Dronitaly, a Bologna il meglio dell’industria dei droni mondiale con 8.500 visitatori e 50 espositori
Dronitaly, a Bologna il meglio dell’industria dei droni mondiale con 8.500 visitatori e 50 espositoriGrande partecipazione alla decima edizione di Dronitaly, la manifestazione per i droni civili a uso professionale organizzata da BolognaFiere Water&Energy che si è svolta dal 9 all’11 ottobre 2024 a Bologna. Oltre 2500 visitatori, circa 80 relatori...
-
 Droni, automazione e intelligenza artificiale: Inspire sviluppa la piattaforma per il monitoraggio degli incendi
Droni, automazione e intelligenza artificiale: Inspire sviluppa la piattaforma per il monitoraggio degli incendiNelle attività di spegnimento di un incendio boschivo, la Protezione civile e i Vigili del fuoco si trovano frequentemente a dover affrontare la riaccensione di fuochi da punti caldi considerati già spenti, soprattutto durante la notte quando...
-
 Un centro di formazione di alto livello con macchine convenzionali e CNC Emco
Un centro di formazione di alto livello con macchine convenzionali e CNC EmcoPunto di riferimento nella formazione degli apprendisti: lo stabilimento di Steyr del Gruppo BMW è una fabbrica modello. Produce motori diesel e benzina e componenti per la mobilità elettrica. Impianti di produzione e fabbricazione all’avanguardia, i più elevati standard...
-
 I robot mobili rivoluzionano la logistica industriale
I robot mobili rivoluzionano la logistica industrialeÈ indubbio il crescente ruolo dei robot mobili nell’ottimizzazione della logistica e della movimentazione all’interno delle fabbriche e dei magazzini. Scopriamo le principali tipologie di robot mobili, tra cui AGV (veicoli a guida automatica), AMR (robot mobili...
-
 La nuova mobilità passa anche per i droni
La nuova mobilità passa anche per i droniLo scenario prossimo futuro sulla mobilità immagina non solo nuovi modelli di organizzazione dei trasporti e dei mezzi di trasporto, ma suggerisce anche nuove abitudini nella gestione degli spostamenti di persone e merci e la realizzazione di...
-
 Il mercato italiano dei droni vale 145 Mln
Il mercato italiano dei droni vale 145 MlnIl 2023 è stato un anno di crescita per il mercato professionale dei droni, che ha raggiunto i 145 milioni di euro, +23% rispetto al 2022. Si conferma il progressivo consolidamento degli ultimi anni, con 664 imprese...
-
 L’edge computing per la produzione farmaceutica
L’edge computing per la produzione farmaceuticaParte del gruppo Italfarmaco, primaria realtà farmaceutica che dispone di numerosi impianti in Italia e nel mondo, Chemi SpA è specializzata nella produzione e commercializzazione di principi attivi farmaceutici e di prodotti farmaceutici etici, che produce anche conto terzi....
-
 Fitofarmaci distribuiti con i droni per la cura delle piante
Fitofarmaci distribuiti con i droni per la cura delle pianteLa società Flowdron, insieme al suo partner Sky53, ha recentemente condotto una sperimentazione in Svizzera per conto dell’ente Agroscope sull’erogazione in agricoltura di liquidi e sostanze tramite l’uso dei droni. La sperimentazione ha confermato l’interesse verso queste...
-
 Anipla Techtalk: sistemi APC con tecnologia MPC
Anipla Techtalk: sistemi APC con tecnologia MPCUno dei prossimi Techtalk, gli incontri online snelli e veloci di Anipla, sarà dedicato al tema “Sistemi APC basati su tecnologia MPC”. L’evento sarà liberamente accessibile sul web e si terrà venerdì 29 settembre, dalle 14:00 alle 15:00....
-
 Notebook Panasonic Toughbook 33 a supporto delle squadre di soccorso
Notebook Panasonic Toughbook 33 a supporto delle squadre di soccorsoAbbiamo tutti visto immagini drammatiche di operatori di soccorso alpino che si calano dagli elicotteri per salvare un escursionista ferito da un precipizio, e video di squadre di soccorso oceanico che salpano per rispondere a una chiamata...
Scopri le novità scelte per te
-
Dronitaly, a Bologna il meglio dell’industria dei droni mondiale con 8.500 visitatori e 50 espositori
Grande partecipazione alla decima edizione di Dronitaly, la manifestazione per i droni civili a uso professionale organizzata...
-
Droni, automazione e intelligenza artificiale: Inspire sviluppa la piattaforma per il monitoraggio degli incendi
Nelle attività di spegnimento di un incendio boschivo, la Protezione civile e i Vigili del fuoco si...





Notizie Tutti ▶
-
 Advantech lancia la serie MIC-732, per accelerare lo sviluppo degli AMR con AI
Advantech lancia la serie MIC-732, per accelerare lo sviluppo degli AMR con AISecondo le stime di ABI Research, gli AMR avranno un impatto significativo sul mercato...
-
 UE Digital Product Passport, non un ostacolo, ma un’opportunità
UE Digital Product Passport, non un ostacolo, ma un’opportunitàMentre oggi molte aziende sono concentrate sullo scope 2, ovvero le emissioni indirette di CO2...
-
 Schneider Electric ha contribuito al restauro della Cattedrale di Notre Dame
Schneider Electric ha contribuito al restauro della Cattedrale di Notre DameSchneider Electric ha contribuito, in forma di donazione, al restauro della Cattedrale di Notre...
Prodotti Tutti ▶
-
 Delta lancia la serie di motori MSI per un futuro industriale più sostenibile
Delta lancia la serie di motori MSI per un futuro industriale più sostenibileDelta ha annunciato il lancio della serie di motori MSI nella regione Emea. Si tratta...
-
 Gestione dell’energia nell’armadio di comando con EcoStruxure Panel Server di Schneider Electric
Gestione dell’energia nell’armadio di comando con EcoStruxure Panel Server di Schneider ElectricSchneider Electric presenta il suo gateway IoT della prossima generazione: “L’unità Panel Server PAS...
-
 Protezione contro le sovratensioni per router in fibra ottica
Protezione contro le sovratensioni per router in fibra otticaA fronte di un’inarrestabile espansione delle reti in fibra ottica, per le connessioni Internet...


{kind=link}