

















 81 / 116
81 / 116

Automazione e Strumentazione
n
Ottobre 2015
controllo
tecnica
81
devono essere ulteriormente ricavati noti che siano quelli
del disaccoppiatore inizialmente utilizzato. Inoltre nelle
espressioni delle variabili
v(t)
e
w(t)
devono essere conside-
rate le uscite del disaccoppiatore, non quelle dei controllori.
Infine è opportuno tenere presente che se un disaccoppia-
tore iniziale è già inserito, i tempi morti non possono essere
determinati nel modo usuale, poiché, proprio per effetto
degli elementi non diagonali, le variabili di processo ini-
ziano a variare dopo un tempo che è il minore tra quelli
delle funzioni di trasferimento che le influenzano.
Conclusioni
Senza scomodare gli algoritmi di controllo predittivo,
opportuni ed efficaci per l’ottimizzazione di sistemi con un
ampio numero di variabili, riuscire ad impiegare un approc-
cio multivariabile a livello del controllo PID di base può
migliorare sensibilmente le prestazioni già nel DCS. A que-
sto scopo una semplice tecnica di stima dei parametri di un
modello approssimato (FOPDT) dei processi e delle loro
interazioni può consentire di implementare utili formule
di autotuning o di self-tuning impiegando i dati dei tran-
sitori disponibili nel corso del normale esercizio. Alcune
simulazioni mostrano l’efficacia della tecnica proposta che,
essendo basata sulla valutazione di cifre integrali, risulta
robusta anche nei confronti del tipico rumore di misura pre-
sente nelle applicazioni reali; prove sperimentati sono state
infatti effettuate con successo per il controllo di umidità e
temperatura di un incubatrice neo-natale.
Riferimenti
[1]
M. Lee, K. Lee, C. Kim, J. Lee, “Analytical Design
of Multiloop PID Controllers for Desired Closed-loop
Responses”,
AIChE Journal
, 50, 2004.
[2]
M. Veronesi, A. Visioli, “An Automatic Tuning
Method for Multi-loop PID Controllers”,
IFAC World
Conference
, Milan 2011.
[3]
W.L. Luyben, “Simple method for tuning SISO con-
trollers in multivariable systems”,
Ind. Eng. Chem.Process
Des. Dev.
, 25, 654 (1986).
[4]
A.S. Rao, V.S. Rao, M. Chidembaram, “Delay Com-
pensated controllers for two input / two output (TITO) mul-
tivariable processes”,
Asia-Pac. J. Chem. Eng.
, vol. 2, pp.
510-516, 2007.
[5]
B. Huang, Q. Wang, X.Guo, “Autotuning of TITO
decoupling controllers from step test”, ISA Transactions,
39: 407-418, 2000.
n
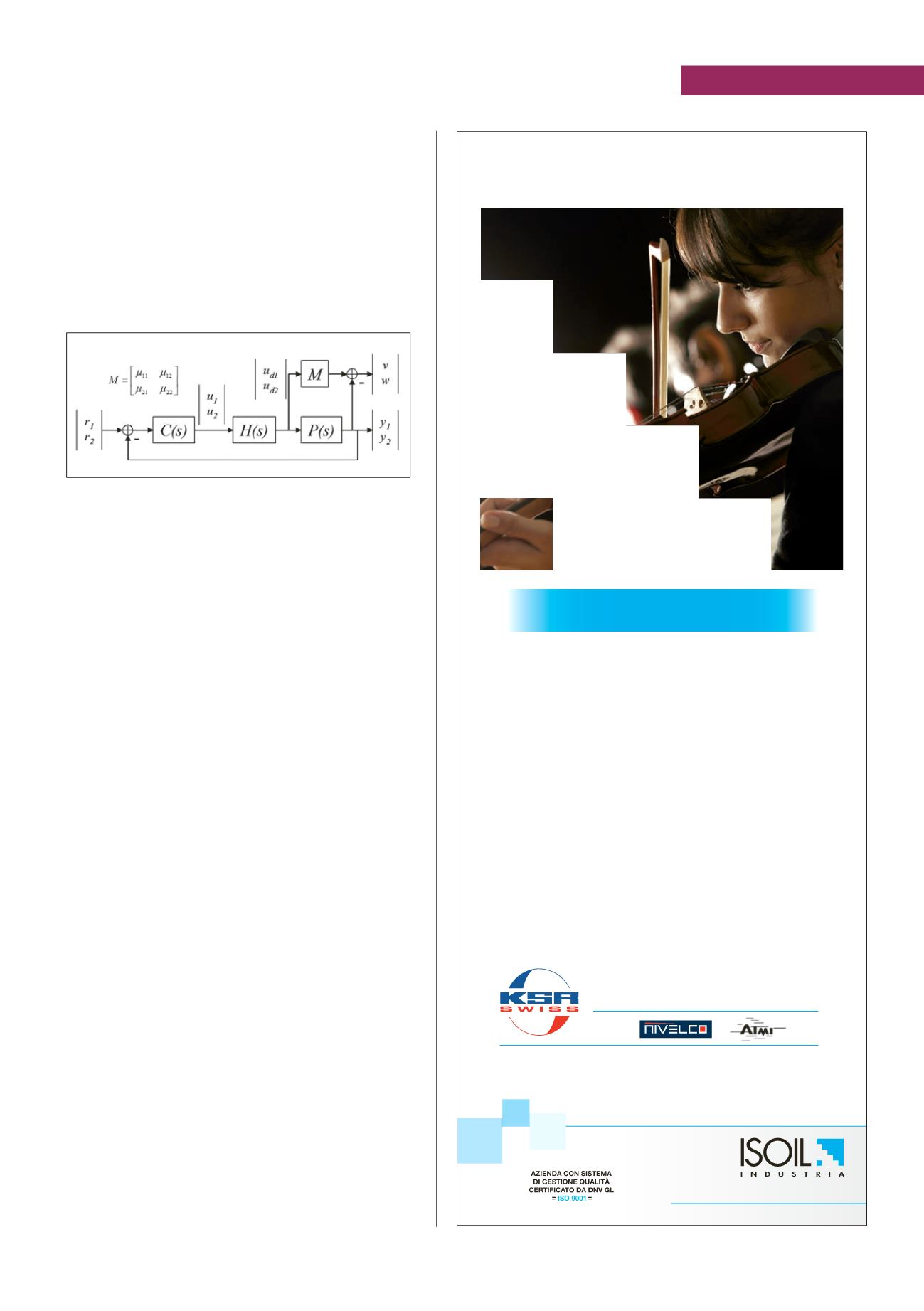
Figura 7 - Schema generale per implementazione di autotuning in
presenza di disaccoppiatore (H(s))
Cinisello B.- MI (Italy) tel. +39 0266027.1 www.isoil.com [email protected] Le soluzioni che contano gandini-rendina.com Misure di livello? Disponiamo di tutte le tecnologie per la trasmissione e misura del livello: • Magnetostrittivi • Radar • Ultrasuoni • Capacitivi • Battente idrostatico • Forniamo il software per la gestione completa del vostro parco serbatoi e ... ... garantiamo soluzioni mettendo in campo know-how ed esperienza acquisite in oltre 55 anni di presenza sul mercato. Orchestriamo soluzioni da un decimo di mm in su con un’ampia gamma di strumenti ad alta tecnologia e servizi di consulenza. Isoil è la tua soluzione, precisa, efcace, qualicata. KUBLER in Italia siamo noi. Inoltre Allora non esistate a contattarci per avere maggiori informazioni: [email protected]