Automazione e Strumentazione
■
Settembre 2013
MOTORI
approfondimenti
51
Come si può osservare, un sistema Chop-
per arriva molto più velocemente alla
tensione di pilotaggio del motore i
ph
ma
richiede un’elettronica di gestione più
complessa.
Ovviamente la scelta su come pilotare un
motore passo-passo dipende da una mol-
teplicità di fattori e da un’analisi compa-
rata dei vantaggi e svantaggi.
Comando Unipolare o Bipolare
Un’altra caratteristica del motore-passo è
la scelta del tipo di avvolgimento delle bo-
bine di alimentazione: si può scegliere un
avvolgimento unipolare
o bipolare.
Ma prima di affrontare
l’argomento dobbiamo
prima capire il princi-
pio di funzionamento del
motore passo-passo.
Il motore è costituito da
due parti principali:
Da un lato il rotore che
consiste in una serie di
magneti per-
manenti di-
stribuiti radialmente sull’albe-
ro di rotazione.
Dall’altro lato lo statore costi-
tuito da elettromagneti in modo
che, opportunamente alimen-
tati, possano generare campi
magnetici orientati come da
υ
figura 6
.
Vantaggi del bipolare
rispetto l’unipolare
Il vantaggio principale di un
sistema con avvolgimento
bipolare è che viene utilizzato
sempre la totalità dell’avvolgimento in
rame della parte statorica, questo consente
una migliore efficienza e una maggior
coppia a bassa velocità.
Pertanto, a bassa velocità, è possibile uti-
lizzare magneti più piccoli per avere la
stessa coppia.
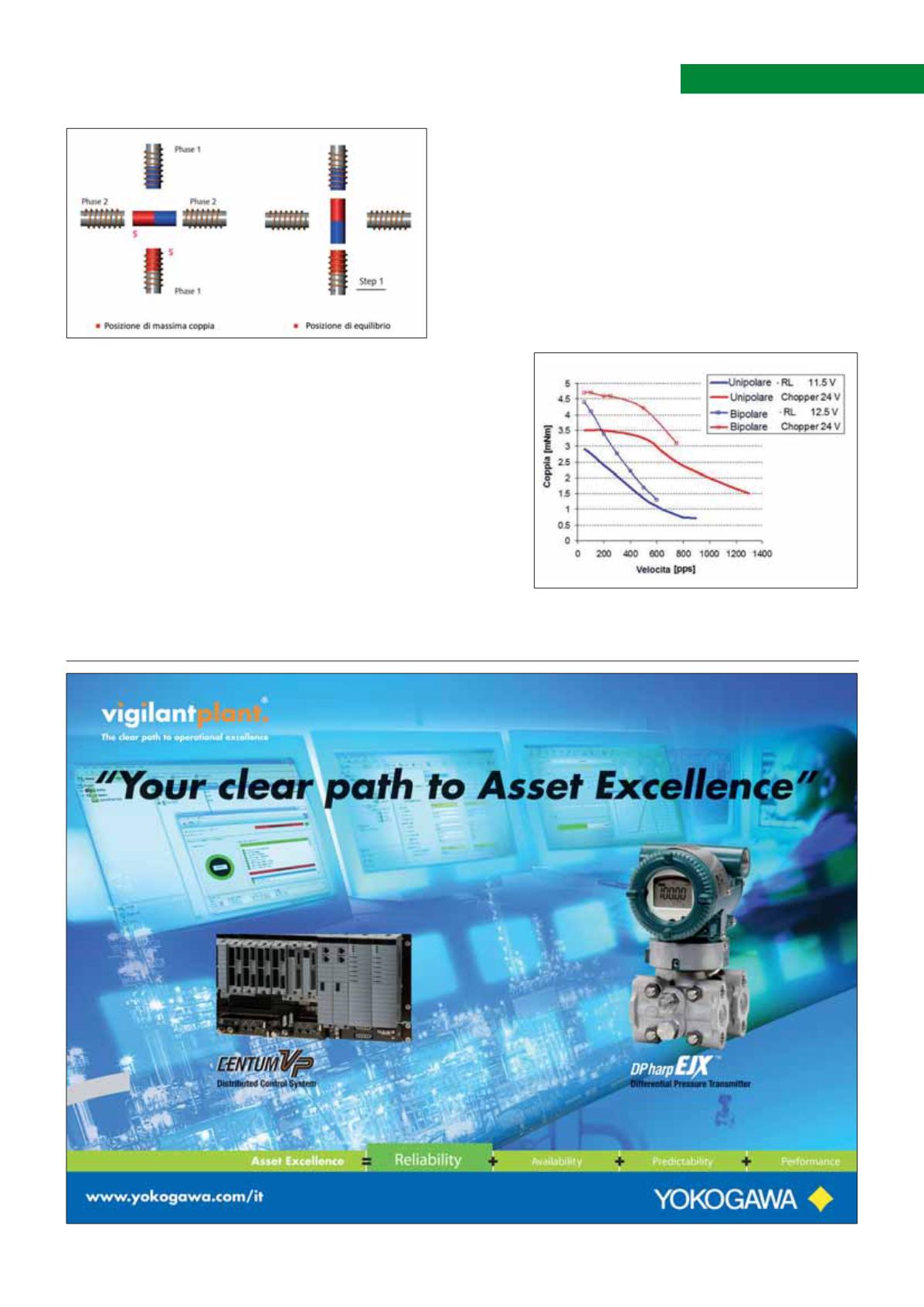
Nella
υ
figura 7
è possibile osservare il
valore della coppia fornita da un motore
passo-passo al variare della velocità e della
tipologia di avvolgimento statorico.
■
Figura 6 - Rappresentazione schematica del sistema rotore-statore
figura 7 - Rappresentazione della coppia fornita da uno stesso
motore con avvolgimento unipolare o bipolare, al variare del tipo
di comando RL o Chopper


