

















 87 / 100
87 / 100

CONTROLLO
tecnica
Automazione e Strumentazione
Settembre 2016
87
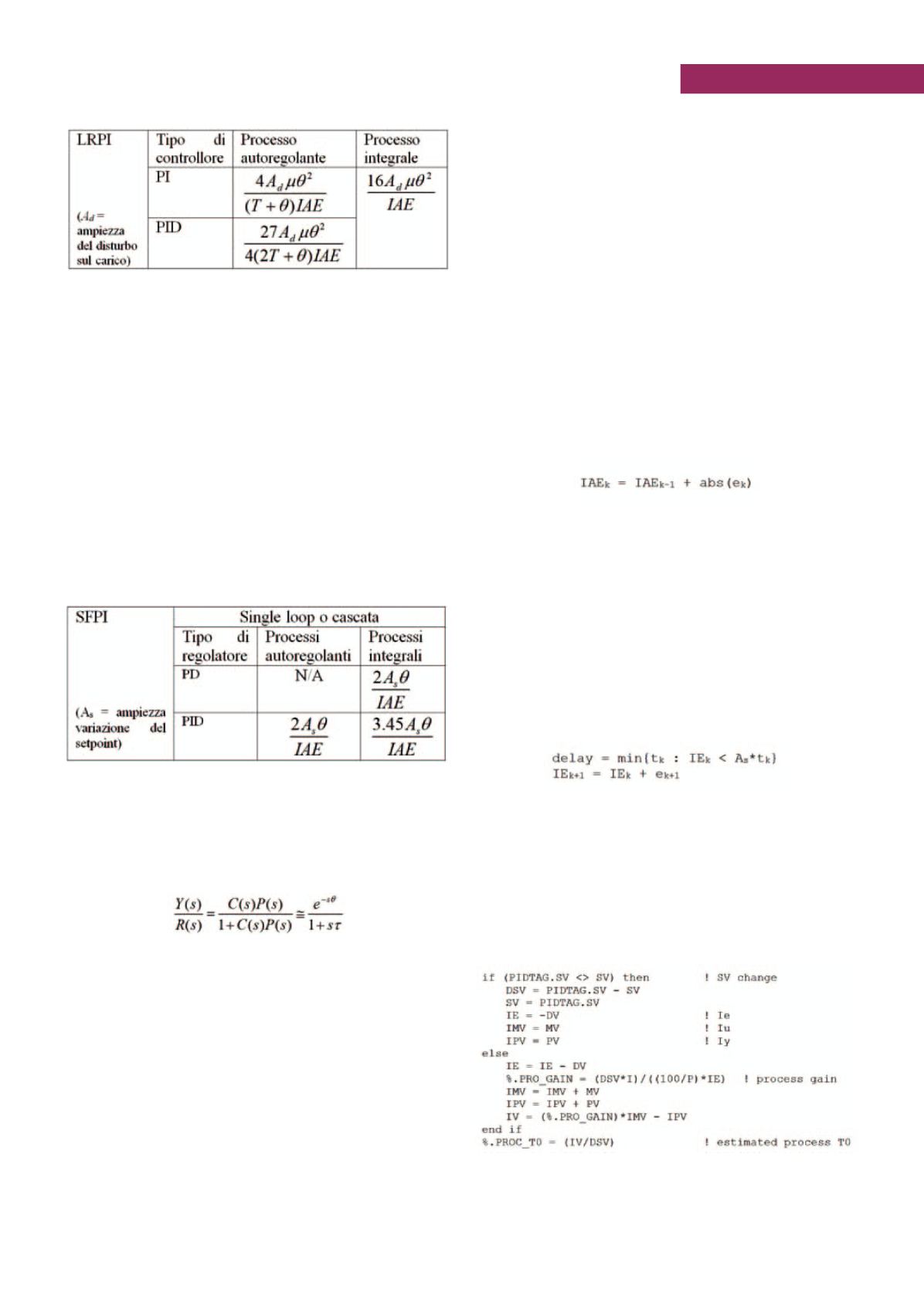
Come si nota la performance viene misurata in base all’integrale,
lungo il transitorio, del valore assoluto dell’errore (IAE), che non
considera le prestazioni di robustezza; per questo motivo il valore
con cui esso viene confrontato non è il valore ottimo potenzial-
mente ottenibile applicando tecniche di ottimizzazione, bensì il
valore ottenibile da un regolatore tarato come in
[3]
su processi
del primo (PI) o secondo ordine (PID): l’indice dovrebbe pertanto
essere tanto più vicino a 1 quanto più il processo risulta ben rap-
presentato da modelli di questo tipo (che comunque costituiscono
un modello approssimato di processi di ordine più elevato in base
alla “half-rule” proposta in
[5]
).
Per quanto riguarda l’inseguimento del riferimento
r(t)
si perviene
invece alla
υ
tabella 2
ove
A
s
è l’ampiezza della variazione a
gradino di setpoint.
Ancora una volta la misura della prestazione è data dallo IAE e
il suo valore di riferimento deriva dall’obiettivo di ottenere tra il
setpoint e l’uscita una funzione di trasferimento
Ove
θ
è sempre il ritardo del processo mentre
τ
è un parametro
di progetto che si fissa, ragionevolmente, pari a
θ
(con il quale si
ottengono un margine di fase di circa 61.4° e un margine di gua-
dagno di 3.14).
L’indice SFPI dovrebbe idealmente valere 1 qualora la funzione
di trasferimento tra il riferimento e la variabile da controllare sia
effettivamente quella desiderata. Dato che però non è lecito igno-
rare le approssimazioni introdotte (modello FOPDT,
e
-s
θ
≅
1-s
θ
),
è ragionevole ritenere buona la prestazione se già
0.6; in
ogni caso il valore di
SFPI
oltre il quale la prestazione può rite-
nersi buona rimane un parametro a disposizione dell’utilizzatore,
che può così esprimere un giudizio più o meno severo. Si tenga
conto, peraltro che il valore ottimo dello IAE ottenibile con un
controllore generico (non PID) è pari a 1,38
θ
A
s
e che il PID, per
un processo del secondo ordine, consente di raggiungerlo con una
efficienza al più pari al 65%
[4]
.
Check-up per il blocco PID
Data la abbondante disponibilità di memoria e risorse computa-
zionali nei moderni controllori DCS, non è difficile includere tra
i loro compiti anche delle semplici routine di calcolo dello IAE
e proporre agli operatori dei semplici cruscotti nell’ambiente a
loro familiare delle pagine grafiche disponibili in sala controllo.
In questo modo risulta inoltre facile tenere conto automaticamente
del calcolo del tempo ciclo entro il quale la CPU svolge l’algo-
ritmo PID che viceversa sarebbe più complesso qualora l’opera-
zione venisse svolta da un pacchetto software di livello superiore
al quale i dati vengono passati non in real-time ma magari una
volta al secondo attraverso una interfaccia OPC.
Il valore dello IAE viene agevolmente calcolato in modo incremen-
tale (senza bisogno quindi di tenere lunghi array in memoria) come
Dopodiché l’indice di prestazione viene semplicemente ottenuto
come
IAE
rif
/IAE
k
ove
IAE
rif
è il valore di riferimento corrispon-
dente a uno dei casi riportati nelle
υ
tabelle 1
e
2
.
Il valore di ritardo puro (
θ
) viene ragionevolmente stimato in base
al tempo necessario perché il segnale di misura inizi a variare
significativamente uscendo dalla soglia di rumore; per evitare di
sotto-stimarlo è opportuno che tale soglia sia sufficientemente
ampia ma così si rischia poi di sovrastimarlo; un’alternativa è
quindi quella di considerare l’integrale dell’errore: quando smette
di essere proporzionale al tempo (attraverso l’ampiezza della
variazione di setpoint) significa che il ‘dead time’ è trascorso.
Quindi:
Per quanto riguarda invece la reiezione dei disturbi è necessa-
rio stimare anche altri parametri del processo (il guadagno e la
costante di tempo principale); pertanto è opportuno rifarsi ai
loro valori forniti dai blocchi di identificazione disponibili nelle
librerie dei DCS oppure aggiungere altro codice per ricavare µ e
T
σ
=(
T+
θ
), come indicato in
[1]
,
[2]
. Un esempio di come, a fronte
di ogni variazione di setpoint, ciò può essere facilmente imple-
mentabile è questo:
Nel caso del disturbo additivo le formule sono un più complesse
ma la questione più importante è che esso sia misurabile in modo
da far ‘partire’ gli integratori e la stima del ritardo allorché si rileva
Tabella 1 – Indici di prestazione per reiezione disturbo sul carico (LRPI)
Tabella 2 – Indici di prestazione per inseguimento setpoint