Automazione e Strumentazione
■
Maggio 2014
CONTROLLO
tecnica
87
zioni di trasferimento di ordine più elevato, tanto meno il compen-
satore di tipo lead/lag riesce ad effettuare un’azione efficace. Inol-
tre in generale i benefici degli accorgimenti più avanzati risultano
tipicamente meno pronunciati quanto più i due ritardi sono diversi
(
e
<<L
) e quando il disturbo agisce “più lentamente” (ovvero se
o
>T
): in tale ultimo caso, infatti, la rimozione del feedback attra-
verso il blocco B può risultare perfino meno performante del sem-
plice blocco standard (lead/lag) di feedworward.
Conclusioni
La compensazione in anello aperto dei disturbi misurabili per-
mette di aumentare notevolmente l’efficacia del controllore com-
plessivo. Semplici formule basate
sulla robusta valutazione di cifre
integrali consentono di ricavare
direttamente i parametri princi-
pali utili alla sintonia automa-
tica del compensatore. Ulteriori
accorgimenti nella taratura dei
parametri e/o nella struttura del
controllore consentono di miglio-
rare maggiormente le prestazioni.
Riferimenti
[1]
S. Skogestad, “Simple ana-
lytic rules for model reduction and
PID controller tuning”,
Journal of
Process Control
, n. 13, pp. 291–309, 2003.
[2]
M. Veronesi, A. Visioli, “Performance assessment and retun-
ing of PID controllers”,
Industrial and Engineering Chemistry
Research
, n. 48, pp. 2616–2623, 2009.
[3]
M. Veronesi, A. Visioli, “Automatic Tuning of Feedforward
Controllers for Disturbance Rejection”,
Industrial & Engineering
Chemistry Research
, n. 53 (7), pp 2764–2770, 2014.
[4]
J. L. Guzman, T. Hagglund, “Simple tuning rules for feedfor-
ward compensator”,
Journal of Process Control
, n. 21, pp. 92–102,
2011.
[5]
C. Brosilow, B. Joseph.
Techniques of Model-based Control
,
Prentice Hall, New Jersey, 2012.
■
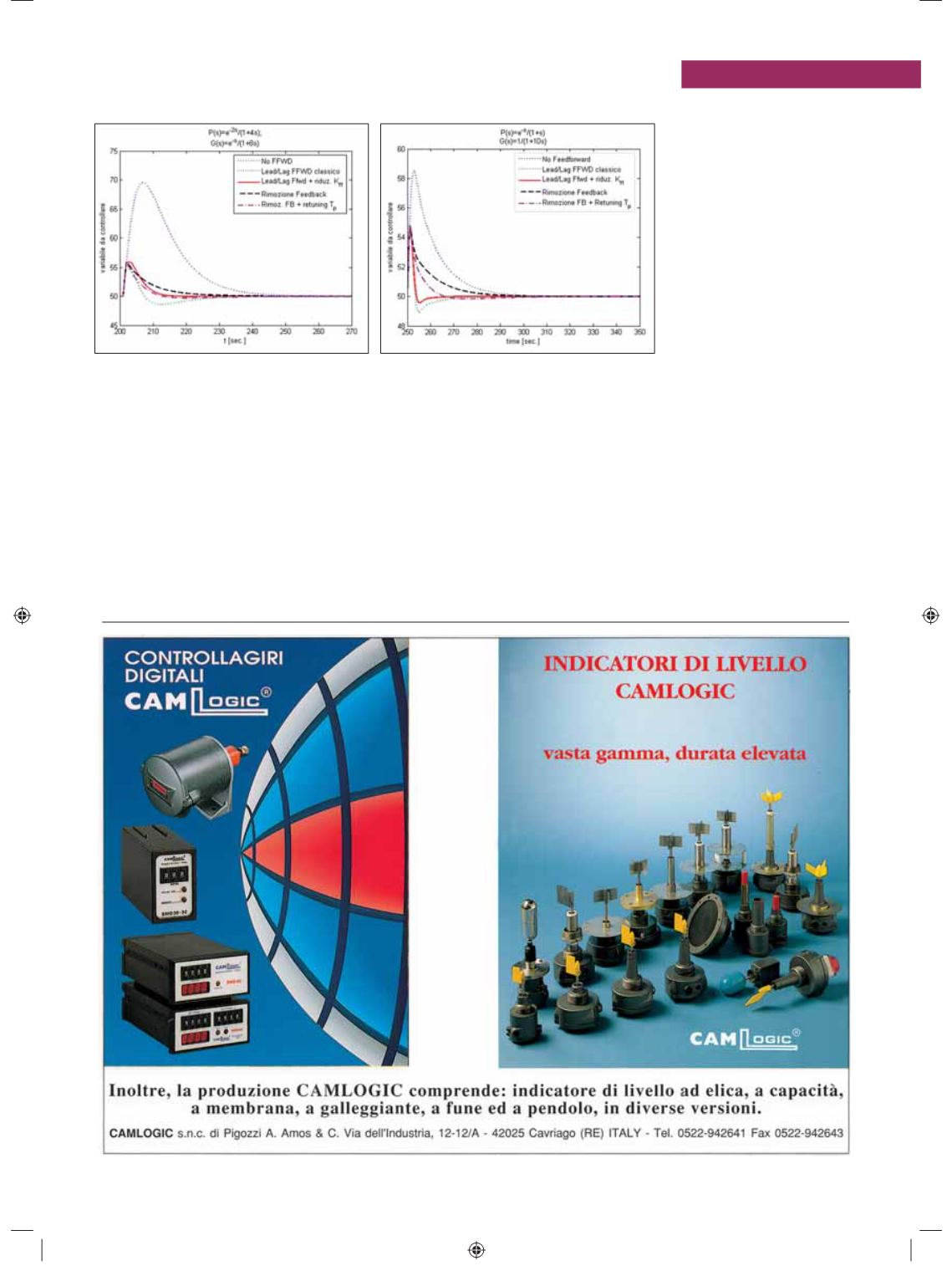
Figura 7 - Esempio 4
Figura 8 - Esempio 5


