
















 92 / 100
92 / 100

CYBER SECURITY
tecnica
92
Giugno/Luglio 2016
Automazione e Strumentazione
che ruotando si ritrovi girato nel senso di volo opposto e, a causa
della scelta di riportarsi sempre nel verso del goal, si potrebbero
creare delle situazioni di contraddizione, portando il quadrirotore a
rimanere fermo o a continuare a ruotare su se stesso.
Conclusioni
Per testare il corretto funzionamento del sistema di controllo svi-
luppato, si è scelto di agire in ambienti simulati, per mitigare even-
tuali rischi provenienti da un cattivo funzionamento. Nello spe-
cifico sono state effettuate simulazioni in un ambiente ricostruito
tramite l’utilizzo di software di simulazione opportunamente scelti,
in grado di riprodurre l’ambiente reale in modo fedele, con la pos-
sibilità di considerare forza di gravità, vento, ostacoli mobili ecc.
Ad oggi sono presenti diversi studi concernenti il volo autonomo,
ma molti di essi propongono sistemi basati su conoscenza a pri-
ori, sistemi che utilizzano sensori a bassa risoluzione, o sistemi
con elaborazione dei dati complessa e risposta lenta. Il sistema
creato, al contrario, è
capace di navigare in ambienti scono-
sciuti
e utilizza una tecnologia laser, caratterizzata da un’
alta
accuratezza
. Inoltre, il tipo di output del sensore laser permette
un’
elaborazione relativamente semplice e celere
. Grazie a que-
ste caratteristiche il sistema risultante è di tipo ‘see and avoid’,
sul quale attualmente si concentra la ricerca in ambito UAV. Al
centro del lavoro si trovano le strategie di navigazione e anticolli-
sione ideate e realizzate. Una volta implementate queste strategie,
si è proseguito con test e simulazioni, alla luce dei quali è possi-
bile affermare che il sistema si comporta egregiamente, riuscendo
a navigare in ambienti sconosciuti, in presenza di ostacoli, e ad
evitare le collisioni. Una volta ottenute simulazioni soddisfacenti,
l’applicazione è già in grado di operare in un ambiente reale,
salvo alcune modifiche di tipo adattativo (come il trattamento
degli output dei sensori, la descrizione urdf del drone ecc.), senza
però modificare il controllore creato. Gli scenari di utilizzo degli
UAV sono in continua crescita, alcuni di questi scenari possono
essere affrontati con la medesima configurazione del drone, men-
tre per altri si necessita di dispositivi hardware aggiuntivi, come
ad esempio l’aggiunta di alcuni sensori (considerando sempre i
vincoli fisici, come ad esempio il carico massimo che il drone
è in grado di sollevare). Il sistema progettato, inoltre, dispone
di una telecamera, non utilizzata ai fini della navigazione ma
semplicemente per permettere le riprese aeree. Per effettuare un
monitoraggio più accurato, aggiungendo un sensore a infrarossi o
una camera iper-spettrale, sarebbe possibile analizzare lo stato di
salute delle piantagioni, ottimizzando lo spreco di acqua e pesti-
cidi. L’impiego di questo sistema potrebbe essere molto utile, ad
esempio, nel prelievo di campioni ambientali. Utilizzando sen-
sori per il rilevamento dell’inquinamento o di altre sostanze, esso
sarebbe in grado di raggiungere dei punti pericolosi per l’uomo o
di difficile raggiungimento in modo completamente autonomo.
Infine, se ad esempio si volesse impiegare il drone in ambienti
più estesi, il sistema richiederebbe una maggiore autonomia e
un maggiore raggio di comunicazione tra stazione di controllo e
drone. Per aumentare l’autonomia sarebbe sufficiente utilizzare
batterie con un amperaggio maggiore, ma queste comportereb-
bero un peso maggiore. Diversi studi si stanno orientando sull’u-
tilizzo dell’energia solare, che, oltre a permettere un minor peso
e una maggiore autonomia, avrebbe anche aspetti positivi per
quanto riguarda la salvaguardia dell’ambiente. Mentre per con-
sentire un raggio di comunicazione maggiore sarebbe possibile
utilizzare antenne a microstriscia. È quindi evidente come questo
sistema può essere la base per lo sviluppo di molte applicazioni,
e per l’utilizzo in diversi scenari. A volte è sufficiente aggiungere
sensori specifici a seconda dell’obiettivo.
Il premio ‘Alessandro De Carli’ 2015
Il lavoro di ricerca che è oggetto del presente articolo è risultato vincitore nel 2015 del Premio De Carli, un riconoscimento istituito da Anipla, l’Associazione
Nazionale Italiana per l’Automazione. Il Premio è dedicato alla memoria di Alessandro De Carli, che è stato Presidente dell’Associazione e studioso di
ingegneria e tecnologie dei sistemi di controllo, scomparso nel 2012. Nato a Roma nel 1937, De Carli ha insegnato Controlli Automatici, Fondamenti di
Automazione e Automazione Industriale in varie università italiane dal 1967 fino al progetto E-Campus che aveva contribuito a creare alla fine degli anni
2000. Ma è soprattutto alla Sapienza, fin dal 1984, che si è concentrata la sua carriera di professore ordinario di Ingegneria e Tecnologie dei Sistemi di
Controllo. La sua attività non è rimasta circoscritta al mondo accademico. Era infatti un profondo conoscitore della realtà produttiva italiana e internazionale. È
stato Presidente Anipla dal 1999 al 2001, oltre che consulente tecnico, chairman e membro di vari comitati scientifici, tra cui quelli delle riviste ‘Automazione
e Strumentazione’ e ‘Automazione Oggi’. Le ricerche di De Carli si sono focalizzate sui temi delle macchine elettriche, del motion control e dei sistemi di azio-
namento. Negli ultimi anni i suoi contributi più originali sono venuti da campi di studio fortemente innovativi: UML, data processing, simulazione, realtà virtuale, logica fuzzy e controllo intelligente.
Il Premio De Carli, che comprende una borsa di studio, viene assegnato da Anipla agli studenti dell’Università dell’Aquila che presentano il lavoro di tesi che è giudicato come il migliore riguardante
tematiche dell’automazione industriale. Nel 2015 il premio è stato assegnato a Serena Pompeo che, nel corso dell’anno, aveva presentato il lavoro di ricerca svolto per la sua tesi di laurea
magistrale; un lavoro dedicato allo sviluppo di un sistema di controllo di velivoli automatici (UAV) destinati al telerilevamento.
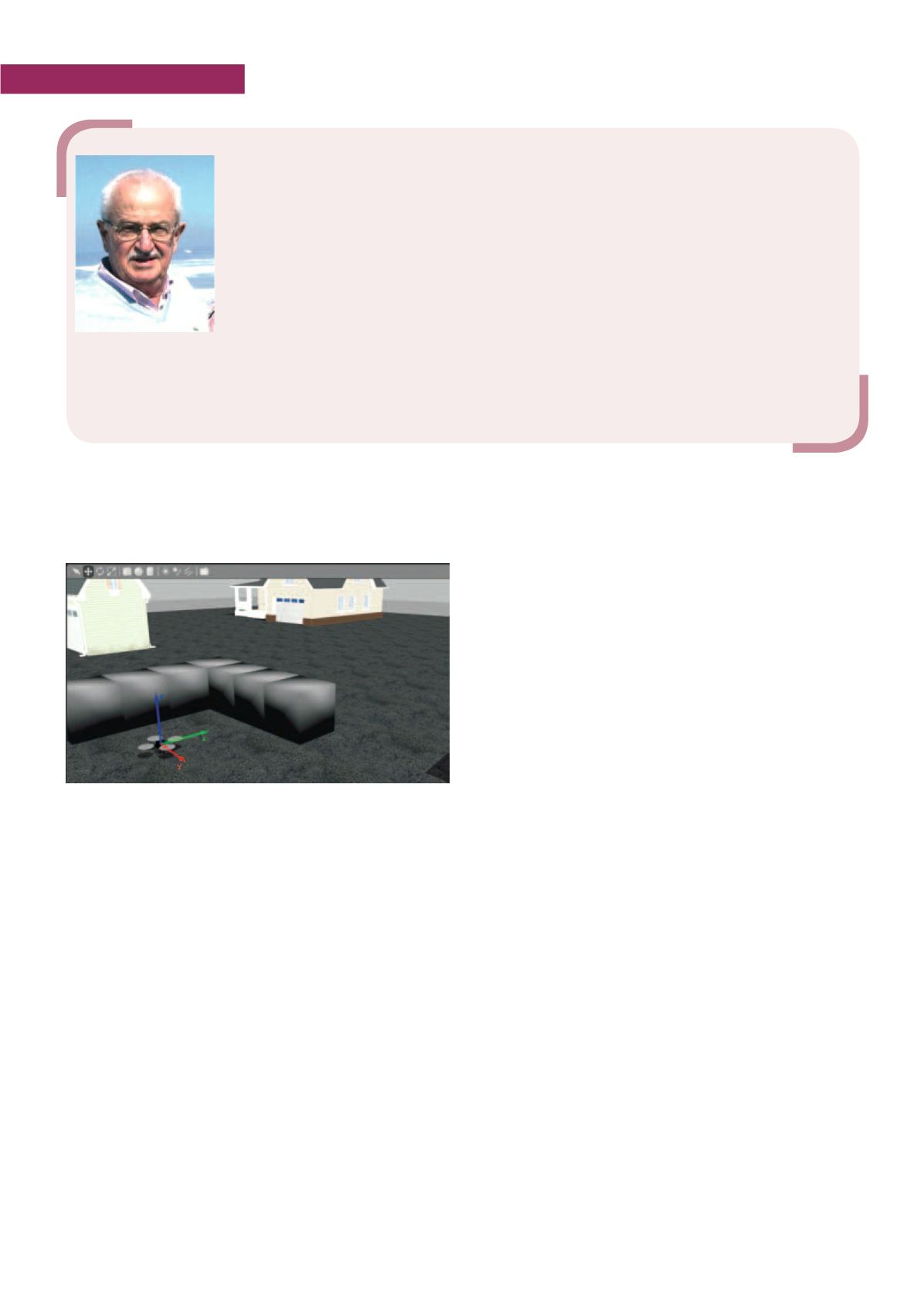
Figura 6 - Esempio di configurazione possibile di ostacoli. In questa rappresentazione
il drone ha il lato sinistro ed il fronte occupati dalla presenza di ostacoli