
















 90 / 100
90 / 100

CONTROLLO
tecnica
Giugno/Luglio 2016
Automazione e Strumentazione
90
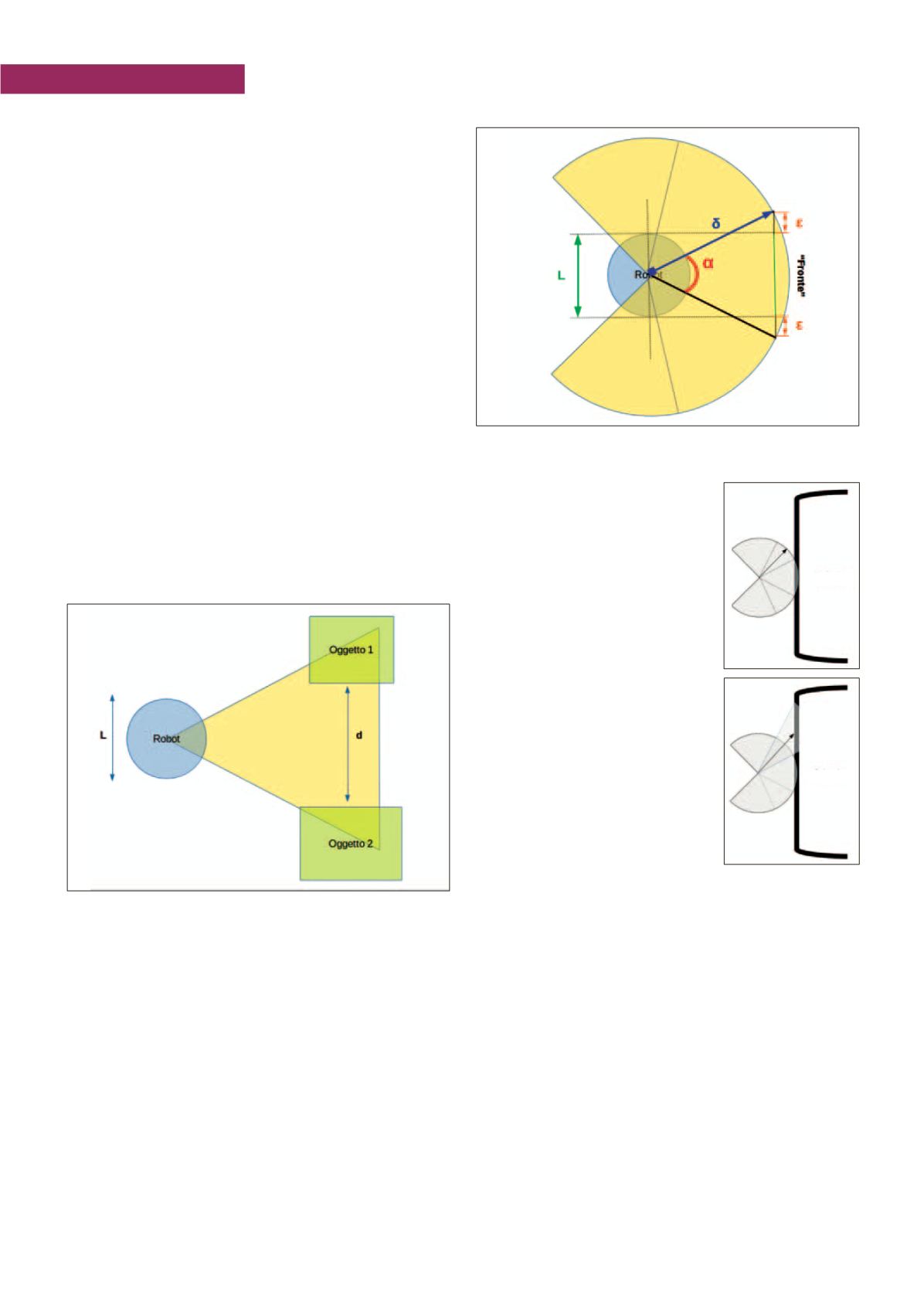
rilevate sono pari al range massimo del sensore, per un raggio di
azione pari a tale range, si ha campo libero. Altrimenti, nel caso
di distanze minori, si presuppone la presenza di un oggetto. Sup-
ponendo di avere il laser puntato frontalmente alla direzione di
volo, può succedere di rilevare due oggetti differenti, uno a destra
e uno a sinistra del quadrirotore.
Questa situazione ha però bisogno di essere elaborata, affinché
si possa decidere se la situazione è a rischio collisione oppure se
si può continuare il volo nella medesima direzione. Ciò che si fa
è analizzare i dati per capire se il quadrirotore ha spazio a suffi-
cienza per passare tra i due (o più) oggetti rilevati.
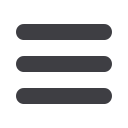
Ciò che si fa è andare a creare un’
‘area di collisione’
ideale, per
la quale, secondo opportuni calcoli, si può affermare che se un
oggetto è al suo interno, esso rappresenta un ostacolo sicuro. Per
costruire tale area bisogna innanzitutto scegliere una distanza di
rilevamento
į
, ovvero, quanto prima (in termini di lunghezza) si
vuole rilevare l’oggetto, ovviamente
į
dovrà essere minore del
range massimo del laser. Una volta stabilita questa distanza, si può
calcolare l’angolo del settore,
Į
, in modo tale che l’ampiezza del
settore, garantisca il passaggio del quadrirotore. Si aggiunge un
errore
İ
, dettato dall’incertezza che potrebbe presentarsi dalla
stima della posizione o da spostamenti involontari.
A questo punto è possibile calcolare l’angolo tramite un semplice
calcolo trigonometrico.
Un rischio che si può correre è quello di ‘false misurazioni’. Il
laser infatti potrebbe riscontrare un oggetto lì dove non esiste,
ad esempio a causa del rumore. Alla luce di questa possibilità, è
stato inserito un sistema di filtraggio che elimina, o almeno dimi-
nuisce, questo rischio. L’idea è quella di segnalare valori anomali
e di andarli ad esaminare. Se dopo questi opportuni controlli essi
risultano non attinenti vengono eliminati. Tutto ovviamente deve
avvenire con una certa discrezione. È preferibile un oggetto non
reale aggirato, anziché un oggetto reale scambiato per errore ed
eliminato con conseguente collisione. Così come l’area frontale,
anche le altre aree vengono opportunamente costruite. Per esse
però è opportuno impostare una distanza di rilevamento mag-
giore. Infatti, se si impostasse la stessa distanza dell’area frontale,
potrebbe accadere che un ostacolo frontale che si sviluppa lateral-
mente, ad esempio un muro, non venga rilevato.
Una volta rilevato l’ostacolo, è neces-
sario programmare delle correzioni di
traiettoria. Per fare ciò, però, non è suf-
ficiente l’informazione proveniente dal
solo rilevamento frontale, bensì è neces-
sario avere una vista più ampia che per-
metta di decidere la direzione sulla quale
spostarsi. Se si rilevasse un ostacolo
frontale, se a priori si scegliesse di spo-
starsi a destra, ci si potrebbe ritrovare in
una situazione nella quale l’ostacolo si
espande a destra per una distanza quasi
infinita, mentre a sinistra si sarebbe avuto
un passaggio libero. Questo scenario
enfatizza la necessità di cercare vie di
passaggio libero prima di spostarsi in una
qualsiasi direzione.
Qui entrano in gioco le altre aree del
campo di visione del laser. L’idea è
quella di andare ad esaminare queste
aree prima dello spostamento, e diri-
gersi nel verso dell’area dove non vi
sono ostacoli, preferibilmente dal lato
dove l’ostacolo risulta essere più corto.
Ciò che si fa, quindi, è considerare le varie configurazioni (limita-
tamente al numero di aree), e per ogni configurazione, program-
mare un’azione. Ovviamente, se si avessero solo tre differenti
aree, il numero di configurazioni di ostacoli possibili sarebbe
2
3
.
In generale per n sotto-aree, le configurazioni possibili sono
2
n
. Il
numero
n
però è limitato dall’angolo massimo del laser. È impor-
tante chiarire, che pur avendo
2
n
configurazioni diverse, le azioni
possibili sono molto inferiori a questo numero.
In quanto percezioni diverse possono portare alla stessa azione; si
è reso quindi necessario scegliere opportunamente le relazioni per-
cezione-azione, in modo da ottimizzare il carico computazionale.
In presenza di ostacoli, e grazie alla possibilità di riferirsi a più
punti di vista del laser, non è necessario che il quadrirotore ruoti
verso la direzione di marcia; si è scelto di dargli la possibilità di
effettuare anche spostamenti laterali, in quanto potrebbe succedere
Figura 3 - Rilevamento di due oggetti
Figura 4 - Relazione tra componenti geometriche per la rilevazione degli ostacoli
Figura 5 - Profondità
aree laterali
Ostacolo
Ostacolo