

















 85 / 100
85 / 100

CONTROLLO
tecnica
Automazione e Strumentazione
Marzo 2018
85
Evoluzione collaborativa
Dal punto di vista della robotica, si entra, così, nella nuova era
della robotica cooperativa e collaborativa: questi nuovi concetti
rappresentano un importante cambio di rotta rispetto alle teorie
consolidate, dal momento che si permette agli operatori l’utilizzo
di robot senza particolari protezioni di sicurezza (griglie o gab-
bie) o anche l’impiego di più sistemi robotici che rispettivamente
cooperano e collaborano, al fine di svolgere compiti complessi,
controllati/guidati da sistemi di visione che, oltre a verificare il
raggiungimento degli obiettivi, potranno fornire in tempo reale
tutte le utili informazioni sulla qualità delle operazioni e garantire
la sicurezza nell’ambiente di lavoro, oltre ai livelli produttivi.
Da ciò risulta facile comprendere come sia fortemente significa-
tivo l’impatto che innovazioni e teorie di questo genere possono
apportare a realtà industriali: si potrebbero infatti aprire scenari
con approcci operativi caratterizzati da sostanziali vantaggi dal
punto di vista della produttività, riduzione dei costi di produ-
zione, significativo aumento della sicurezza negli ambienti lavo-
rativi, oltre a standard qualitativi concorrenziali.
I robot collaborativi, detti anche
Cobot,
sono particolari robot con
i quali è possibile lavorare fianco a fianco, a pochi centimetri di
distanza, senza necessità di recinzioni perimetrali di sicurezza,
condividendo lo stesso spazio di lavoro. Un aiutante in grado di
svolgere operazioni ripetitive o pericolose, in attività (manuali)
che non possono essere assorbite dalla produzione di massa. L’u-
tilizzo di questi robot è basato su tre principi:
sicurezza
,
facilità
d’uso
,
flessibilità operativa
. La vicinanza tra uomo e robot, in
grado di generare una maggiore efficienza di processo, in assenza
di una separazione fisica, ha comportato lo sviluppo (ancora in
continua evoluzione) di sistemi di sicurezza di alto livello per
garantire l’incolumità dell’operatore. Il cobot, infatti, è provvisto
di meccanismi di anticollisione e/o telecamere che tengono sotto
controllo i propri movimenti e quelli della persona che sta ope-
rando al suo fianco, al fine di evitare contatti che possano gene-
rare lesioni agli utenti. Proprio la presenza dei sensori integrati
permette di rilevare le forze esterne e nel caso in cui esse fossero
superiori ad una certa treshold, il robot smetterà di muoversi. In
alcuni casi (come già nei robot tradizionali) si realizza anche un
controllo sugli assorbimenti di corrente: in caso di sovraccarico, il
software del robot genererà uno stop di sicurezza, perché, se appo-
sitamente settato, può essere inteso come una collisione acciden-
tale. Una caratteristica molto importante, riscontrabile nella mag-
gior parte dei modelli presenti attualmente sul mercato è la loro
struttura realizzata da forme tondeggianti, anche coperte da gusci
protettivi o materiali morbidi (e resistenti, allo stesso momento),
in grado di fornire una maggiore protezione.
Proprio per tale motivo, a livello progettuale, si è deciso di sacri-
ficare la velocità operativa del robot a favore di una maggiore
sicurezza, inoltrandosi sostanzialmente nel paradigma della nuova
robotica industriale, dove uomo e robot possono cooperare, condi-
videndo gli stessi ambienti.
Contestualmente anche la cooperazione tra robot è stata accolta
molto positivamente in ambito industriale perché permette la
realizzazione di una determinata missione in un’unica stazione
robotizzata, senza la necessità di installare sistemi di prote-
zione multipli (con costi non trascurabili) e separare le fasi di
lavoro; è necessario garantire una costante supervisione del sin-
golo robot e l’ambiente circostante, nonché una comunicazione
continua tra i robot coinvolti nella stessa lavorazione, al fine
di ripartire, secondo predefiniti algoritmi, il carico di lavoro. I
sistemi, infatti, sono in grado di mantenere la conoscenza della
loro posizione e la posizione degli altri sistemi, nonché la posi-
zione dell’oggetto, e lavorare congiuntamente per svolgere
compiti complessi, raggiungendo alte performances (tempi di
ciclo, efficienza energetica ecc.).
Seguendo la teoria alla base dell’Industry 4.0, le industrie
moderne, inoltre, rivolgono una particolare attenzione agli stru-
menti che i costruttori di macchinari mettono a disposizione: i
simulatori; essi riescono ad apportare notevoli vantaggi agli uti-
lizzatori, in termini di costi, innovazioni tecnologiche e tempi di
progettazione, mediante la creazione di un modello matematico
e sfruttando gli stessi controllori presenti sui robot, nonché ten-
gono conto di tutti quei fattori (velocità, accelerazioni, inerzie,
tempi ciclo, guasti, scarti ecc.) che influiscono e che si presentano
fisicamente sulle macchine, nonché sul resto degli elementi costi-
tuenti la stazione automatizzata, (come sensori, nastri e tappeti
ecc.). Da considerare, inoltre, la generazione del codice robot, già
in ambiente di simulazione, che può essere direttamente impor-
tato sugli elementi in campo, salvo opportuni settaggi macchina,
consentendo così un insieme di agevolazioni ai programmatori
derivante dalla possibilità resa da tale programmazione offline.
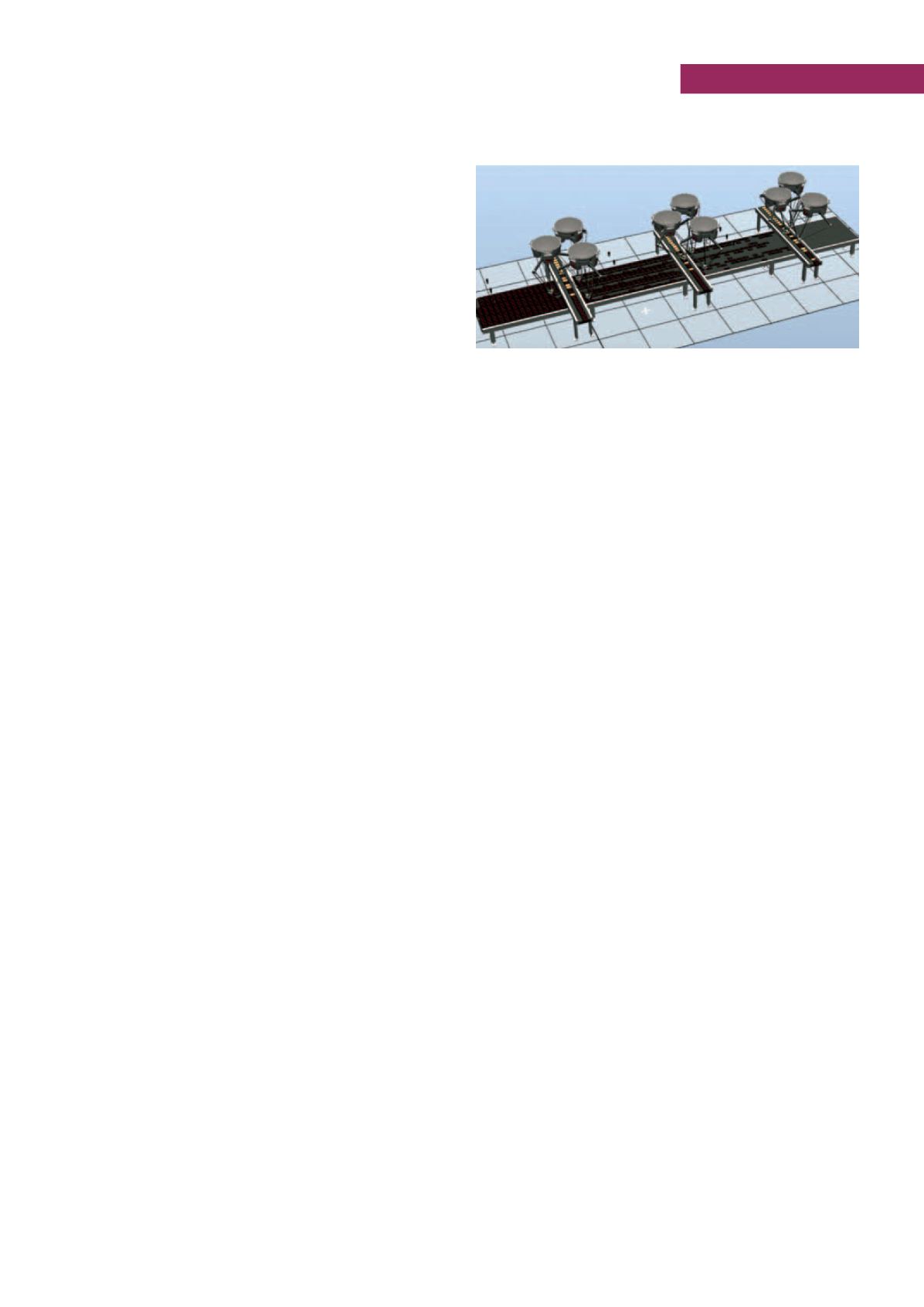
Simulare le applicazioni robotiche
Sulla base di queste motivazioni, pertanto, si è voluta condurre
un’attività di discovery tra le
differenti proposte presenti
sul mercato
, simulando alcune applicazioni industriali che
potessero fornire un quadro globale e significativo. Sono stati
condotti numerosi test, dei quali si riportano due casi pratici,
generalizzati per ragioni di riservatezza, di applicazioni robo-
tiche
collaborative
(stazione di handling, con Cobots Fanuc)
e
cooperative
(impianto di pick&place, con robot delta ABB),
utilizzando dei software proprietari.
Handling collaborativo
Nel primo caso, si è proceduto a valutare la consistenza di una
(possibile) soluzione che coinvolgesse l’utilizzo di un
Fanuc
CR-35iA
, in una
stazione di handling
e lavorazione manuale
di pezzi da 10 kg (e dimensioni 550 x 250 x 550 mm); la solu-
Simulazione di un impianto di pick&place con robot delta