

















 13 / 33
13 / 33

film a differenza di una testa rotativa che salda il film su un
angolo di rotazione molto piccolo. Il servomotore che pilota
il movimento deve seguire un profilo di moto tale che du-
rante tutto il tratto in cui la testa è a contatto con il film la
massa saldante abbia la componente di velocità orizzontale
esattamente uguale alla velocità del film. In riferimento alla
Fig.1, (dove è rappresentata per semplicità solo una delle
due teste) partendo dal punto P0 dove le due masse sono
perfettamente combacianti verticalmente il profilo di moto
è suddiviso in:
• Tratto P0(x0)-P1(x1) orizzontale con raggio che varia da h
a R1 di centro O1.
• Tratto P1(x1)-P2(x2) con curvatura R2 e centro d’istantanea
rotazione O2.
• Tratto P2(x2)-P3(x3) di curvatura R3 e centro d’istantanea
rotazione O1.
• Tratto P3(x3)-P4(x4) con curvatura R2 e centro d’istantanea
rotazione O3.
• Tratto P4(x4)-P5(x5) orizzontale con raggio che varia da R1
a H di centro O1.
In genere sarebbe opportuno introdurre un polinomio di
5° grado di raccordo a cavallo del punto P1 tra X1-Delta e
X1+Delta stessa operazione a cavallo del punto P4 per rac-
cordare la discontinuità di accelerazione.
Dunque, il profilo di moto sarà composto di 5 tratti con le
seguenti condizioni al contorno:
Nei tratti 1-5 e inoltre parzialmente nei tratti 2-4 la compo-
nente orizzontale della velocità delle masse saldanti deve
essere uguale alla velocità del film.
Il tratto 3 è un tratto di raccordo. Tutti i tratti devono avere
agli estremi continuità di posizione e velocità e accelera-
zione con il tratto adiacente, generalmente si accetta il Jerk
discontinuo ma limitato alla fine tratto #1 e #4. Dipendendo
dall’altezza del prodotto l’angolo di impatto (angolo in cui
la testa è a contatto con il film/prodotto) generalmente ha
l’estremo sinistro compreso tra P3 e P4 e il destro compreso
tra P1 e P2 perciò la condizione di componente orizzontale
della velocità della testa deve essere soddisfatta solo all’in-
terno di questo angolo. L’algoritmo FB_TabCamLongDwell_
Tipo01 di calcolo del profilo di moto è in grado di calcolare
la tabella per ‘n’ qualunque numero di teste saldanti com-
patibilmente con i dati meccanici della cam Long Dwell in
oggetto.
Nota_1: Se pensate di avere progettato il profilo di moto in
modo esatto, ma per mantenere la componente di velocità
orizzontale della testa saldante uguale a quella del film du-
rante l’angolo di impatto siete obbligati a mantenere un epi-
ciclo abbastanza diverso dal 100%, vi è sicuramente sfuggito
qualcosa, perciò rifate i conti.
Nota_2: Si noti che il diametro primitivo (distanza tra i due assi
delle due teste) non interviene nel calcolo dell’algoritmo a dif-
ferenza di una testa rotativa.
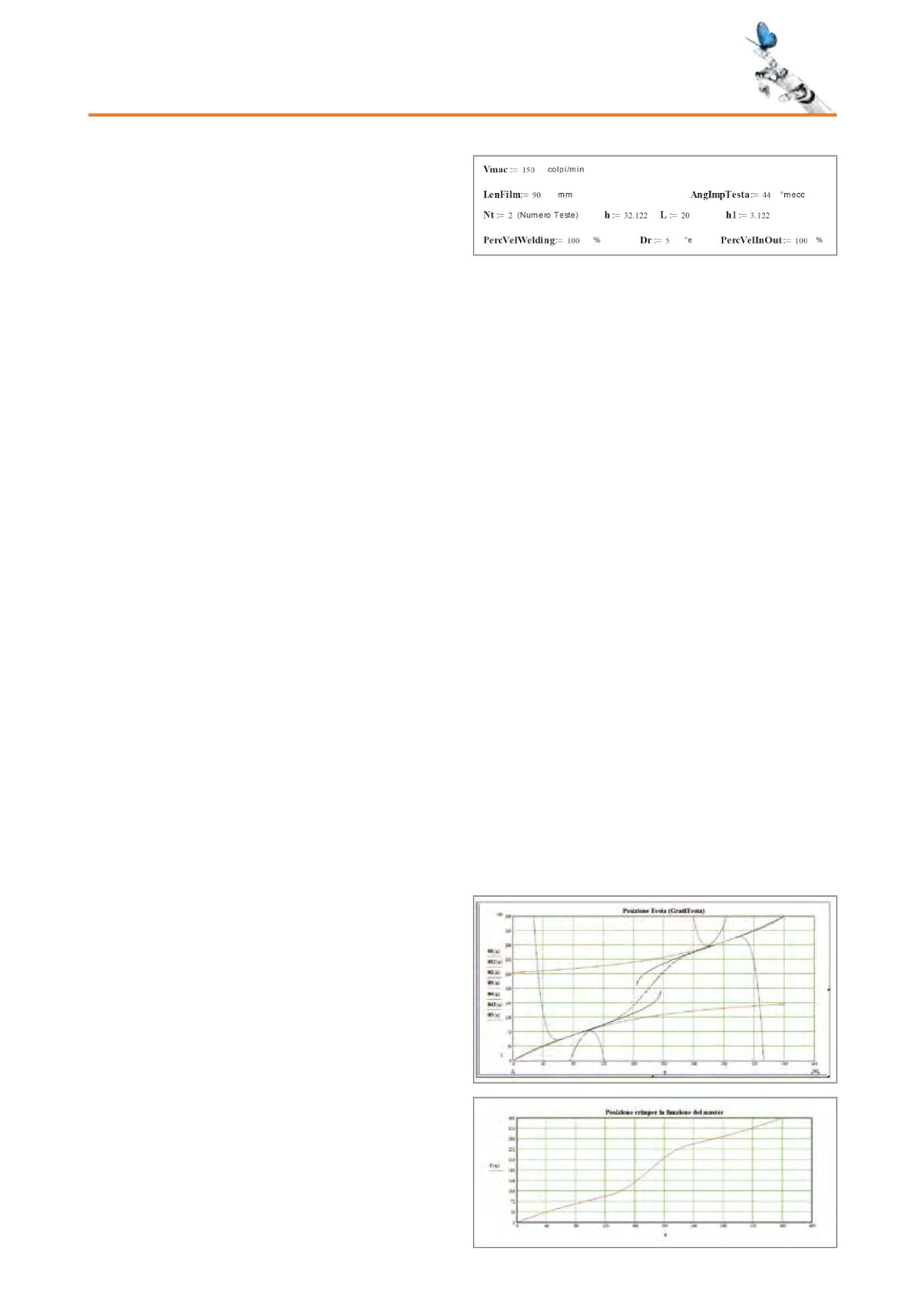
Con i seguenti dati:
PercVelWelding =100% significa che impongo la compo-
nente orizzontale della velocità del crimper sul tratto oriz-
zontale = VelFilm = LenghtFilm/360°, se 90% sarà il 90% del
la VelFilm
PercVel InOut =100% significa che impongo la componente
orizzontale della velocità del crimper sui due archi laterali =
VelFilm = LenghtFilm/360°, se 90% sarà il 90% della VelFilm
Si ottiene il seguente profilo di moto dell’albero motore: si
noti che il punto 0 (inizio grafico) coincide con la posizione
del crimper perfettamente verticale (punto P0 del profilo
meccanico).
Con un passo film di 90 mm il motore è costretto ad accele-
rare fuori taglio per poter tagliare un foglio piccolo rispetto
alla circonferenza primitiva.
Con un passo fil di 190 mm il motore deve rallentare fuori
taglio per poter tagliare un foglio grande rispetto alla cir-
conferenza primitiva.
Tenendo presente che la velocità tangenziale è il prodotto
tra velocità radiale e raggio: si noti dal grafico di velocità che
la velocità (radiale dell’albero) deve diminuire aumentando
il raggio da h a R1 fino al punto P1.
Dal punto P1 al punto P2 ci sono due effetti contrastanti:
il primo porterebbe ad aumentare la velocità radiale
dell’albero per compensare la diminuzione della compo-
nente orizzontale della velocità tangenziale, il secondo
effetto è che il motore dovrebbe diminuire la velocità ra-
diale per compensare l’aumento del raggio da R1 a R2,
alla fine come si vede dal grafico quello che vince è il
primo effetto.
MACHINE AUTOMATION 2015
13