
















 120 / 166
120 / 166

NOVEMBRE-DICEMBRE 2017
AUTOMAZIONE OGGI 402
120
AO
MOTORI
allo schema di controllo che i gruppi intendono utilizzare. Altre
scelte possibili riguardano il raffreddamento e l’avvolgimento dei
motori. I tipi di motore principali sono: a induzione, a magneti
permanenti, a bobine di campo e commutati a riluttanza. I mo-
tori a induzione sono i più semplici da controllare e i più facili
da capire e sono quindi i più utilizzati nel settore; hanno però lo
svantaggio che il campo deve essere eccitato, il che provoca delle
perdite. I motori a magneti permanenti (PM) vengono ampia-
mente utilizzati nelle applicazioni in cui l’efficienza è importante
e le dimensioni costituiscono una limitazione, poiché hanno una
densità di potenza maggiore dal momento che il magnete ali-
menta il campo rotore invece che provocare perdite al rotore.
Questi motori PM richiedono la presenza di un inverter e partico-
lare cura (specialmente per quanto riguarda il raffreddamento)
quando funzionano in modalità diverse. Inoltre, presentano per-
dite in termini di rapporto costante tra potenza e velocità (Cpsr)
perché il campo non può essere indebolito molto facilmente.
L’indebolimento del campo è un metodo utilizzato per ridurre il
campo magnetico del rotore allo scopo di aumentare la velocità
di una macchina. Nelle macchine con motore a induzione o PM,
è possibile indebolire il campo introducendo corrente dall’asse
q. La necessità di avere quantità di corrente dall’asse q (utilizzata
per controllare la coppia) o dall’asse
d (utilizzata per controllare il campo
rotore) per il controllo di tipo FOC è
il motivo per cui molti gruppi sono
interessati al monitoraggio degli
schemi dq0 in tempo reale. Con
una macchina PM è necessario fare
ulteriori considerazioni, poiché i
magneti possono smagnetizzarsi in
fase di indebolimento del campo e
potrebbe essere necessario moni-
torare la forza controelettromotrice.
I motori a riluttanza sincrona (SR)
hanno un rotore molto semplice
che non è altro che una lamina con uno schema preciso. Que-
sti motori usano la proprietà della coppia di riluttanza per creare
un movimento rotatorio. Sono molto utili in diverse applicazioni
grazie alla facilità di costruzione, ma presentano lo svantaggio
di generare grandi quantità di rumore e vibrazioni. Per questo
motivo, sono stati finora utilizzati solo in configurazioni partico-
lari. Durante le prove di queste macchine i ricercatori dovrebbero
disporre di una mappa delle vibrazioni per capire quali vibrazioni
dovute a coppia e velocità sono più intense.
Più il motore è freddo, più le perdite diminuiscono; al diminuire
delle perdite corrisponde un aumento dell’efficienza. Se i ma-
gneti si scaldano troppo, possono smagnetizzarsi in alcune zone,
il che può avere conseguenze decisamente negative. Per questo,
è molto importante mantenere raffreddati spire e commutatori. I
commutatori presentano le perdite mag-
giori e possono addirittura esplodere se si
scaldano troppo. I ricercatori impiegano
molto del tempo dedicato alla progetta-
zione a studiare nuove strategie di raffred-
damento per aumentare l’efficienza delle
macchine. I sistemi di raffreddamento uti-
lizzano spesso acqua, olio o glicole pom-
pato e spruzzato sulle zone che si desidera raffreddare.
L’importanza del raffreddamento delle macchine ha fatto sì che
il monitoraggio diventasse una parte fondamentale delle opera-
zioni di funzionamento e prova. Nelle prove devono essere utiliz-
zate coppie termiche per il monitoraggio delle temperature che
vengono registrate o inviate a un sistema di controllo per lo spe-
gnimento. Per i ricercatori è utile che i valori registrati siano sin-
cronizzati con i dati perché in questo modo possono sapere dove
e quando si sono verificate variazioni di temperatura in risposta ai
loro controlli. Anche questa è un’area dove i dati possono essere
utilizzati per la validazione dei modelli.
Aumento dell’efficienza
Il modo migliore per misurare molti degli aspetti di cui sopra è uti-
lizzare la mappatura dell’efficienza e le prove di tipo dinamome-
trico. A tutti interessa aumentare l’efficienza del proprio sistema:
per farlo, è importante disporre dei dati grezzi perché in questo
modo, se qualcosa non va per il verso giusto, è possibile fare riferi-
mento alle prove precedenti ed effettuare un’analisi approfondita
in un programma post-elaborazione come Matlab. Inoltre, tutto
questo è molto importante per le prove dinamiche perché in fase
di caricamento dinamico o di prove sui cicli di funzionamento,
senza i dati grezzi la misurazione
dell’efficienza non può essere abba-
stanza precisa. All’inizio delle prove
si ha una tensione pre-impostata
del bus c.c., seguita da una velocità
pre-impostata. La macchina viene
poi caricata con una determinata
coppia. Questa operazione viene
eseguita per tutte le coppie deside-
rate e per tutte le velocità disponibili
nella gamma della macchina. Si ot-
tengono così le efficienze per tutti i
punti impostati e quindi una mappa
dell’efficienza. Questi punti vengono
poi portati a un intervallo di temperatura specifico. In alcuni casi
è necessario aspettare che la macchina si raffreddi per poter regi-
strare un punto di prova. È qui che il sistema eDrive Testing di HBM
consente di risparmiare molto tempo perché registrare i punti di
prova in un determinato numero di cicli invece che in pochi se-
condi fa sì che la macchina impieghi meno tempo a riscaldarsi.
Spesso, gli utenti provano le macchine al loro limite con il risultato
di distruggerle, o quasi. Cercano di spingere la macchina alla mas-
sima velocità per capirne i limiti meccanici. La capacità di effettuare
un trigger e di avere a disposizione dati memorizzati in un buffer
consente ai ricercatori di capire non soltanto dove la macchina non
ha funzionato, ma anche perché non ha funzionato.
•
HBM -
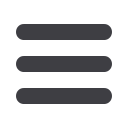
www.hbm.comL’inverter è una parte molto importante del sistema perché è responsabile della
conversione della potenza e delle funzioni di controllo
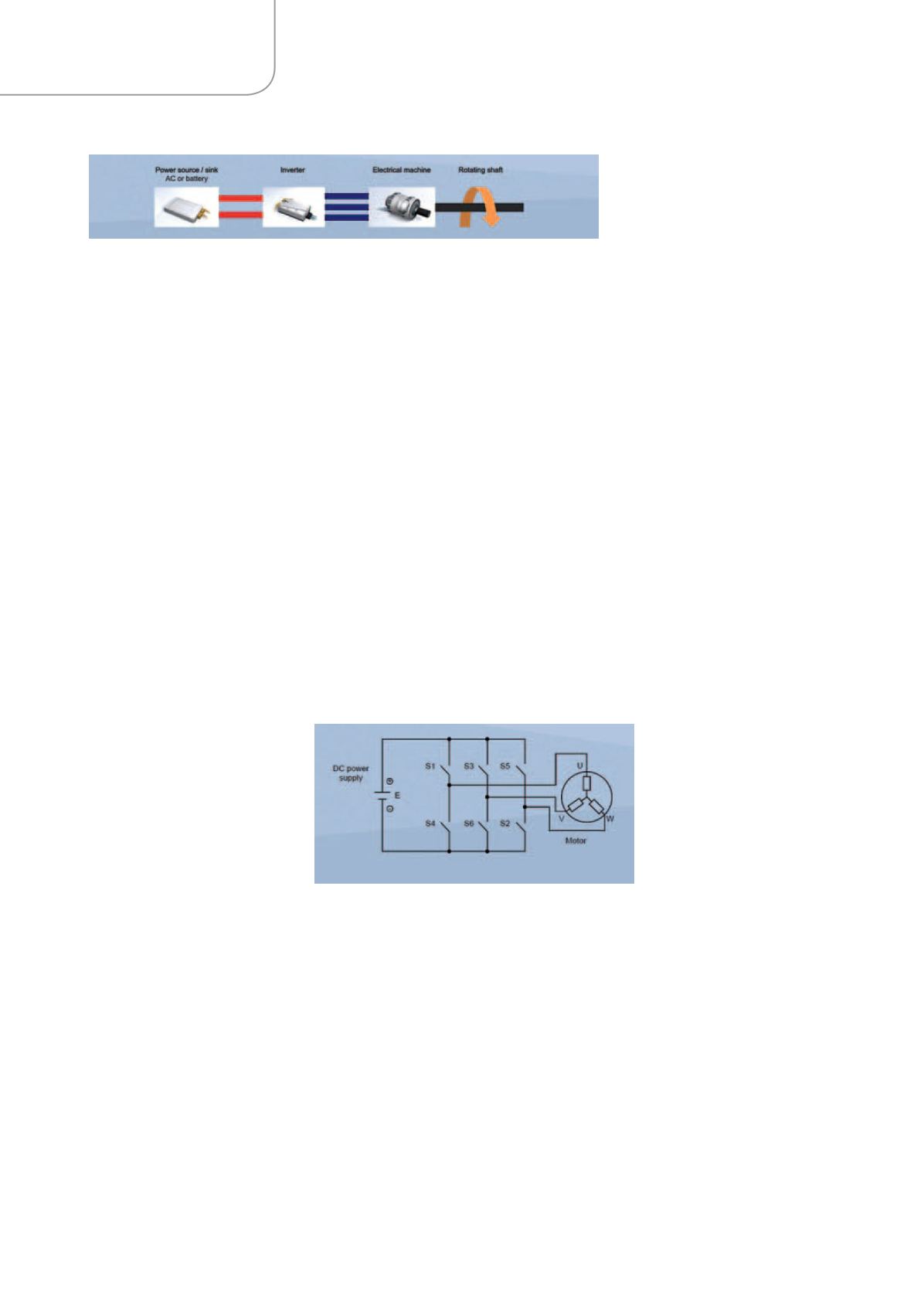
Gli inverter sono solitamente composti da sei
interruttori che si aprono e si chiudono secondo una
determinata sequenza per generare corrente alternata