Beckhoff: robotica, motion control e Plc su una piattaforma Pc
-

- Tweet
- Pin It
- Condividi per email
-
Il software di automazione TwinCAT ora consente anche l’integrazione di robot (cinematiche Delta, Scara) oltre all’interazione e sincronizzazione con le funzioni Motion Control esistenti. In questo modo l’intero sistema di controllo è perfettamente integrato e non occorrono Cpu aggiuntive per i robot. Il controllo basato su Pc pertanto riunisce in sé funzioni Plc, motion control e robotica su un’unica piattaforma hardware e software: una pietra miliare sulla strada verso la “Scientific Automation”.
Il software plug-in “TwinCAT Kinematic Transformation” (trasformazione cinematica) è un primo passo per l’integrazione del controllo robot nella suite di automazione TwinCAT. Le funzioni Plc, Motion Control, HMI e Robotica girano su un’unica Cpu. I vantaggi per l’utente sono evidenti:
– nessuna Cpu aggiuntiva per il controllo del robot;
– riduzione dei costi di engineering: un solo sistema, TwinCAT strumento noto e conforme a standard internazionali, per configurazione, parametrizzazione e diagnostica dell’intera applicazione;
– nessuna perdita qualitativa per l’interazione di Cpu diverse per Plc, motion control e robotica;
– incremento di prestazioni e precisione grazie a interfacce dirette; le usuali complesse comunicazioni fra le diverse Cpu non sono più necessarie.
TwinCAT Kinematic Transformation può essere integrato in modo trasparente nell’ambiente motion control esistente: la sincronizzazione delle funzioni di robotica e motion control è ottimale utilizzando TwinCAT NC PTP (posizionamento assi point-to-point) o NC I (interpolazione assi 3D). Tutte le proprietà NC come “camma elettronica” o “taglio al volo” (sincronizzazione di un asse slave con un asse master in movimento) possono essere combinate a piacere su una piattaforma hardware e software comune.
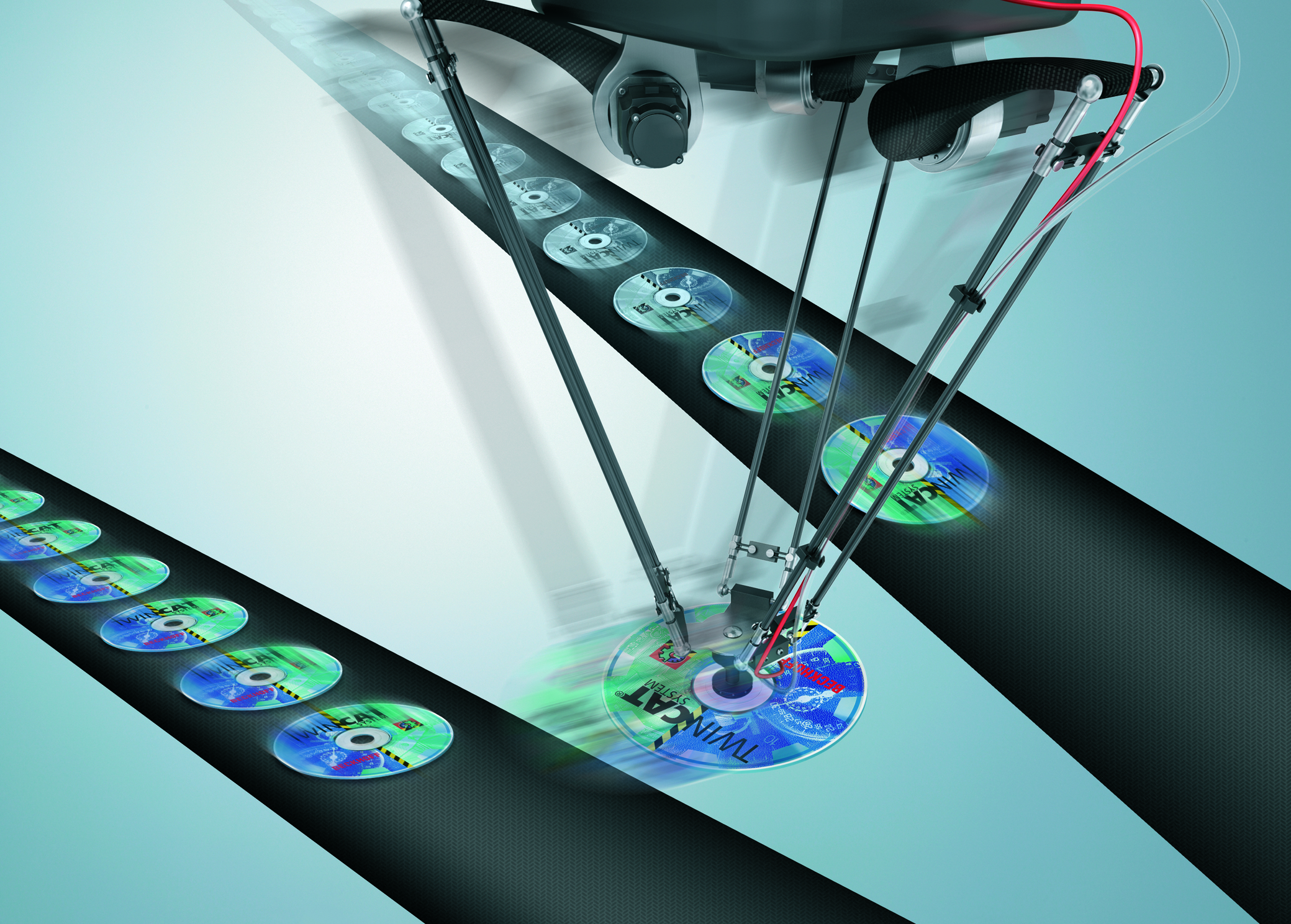
TwinCAT supporta diverse funzioni cinematiche parallele e seriali come quelle utilizzate per il pick-and-place. La programmazione delle coordinate di destinazione avviene comodamente nel sistema di coordinate cartesiane. La conversione alla relativa posizione del motore (trasformazione inversa) viene acquisita dal modulo cinematico. Inoltre si può calcolare il modello dinamico per il pre controllo della coppia.
Il sistema cinematico può essere selezionato comodamente nel TwinCAT System Manager, dove sono parametrizzate – oltre al tipo, ad esempio Delta – anche le lunghezze della leva e gli offset. Per un pilotaggio dinamico è possibile predefinire masse e relativa inerzie.
Con l’ausilio delle funzionalità “taglio al volo” e “camma elettronica” è possibile sincronizzare il robot sui nastri trasportatori per raccogliere o deporre pezzi. Queste applicazioni si ritrovano spesso nell’handling o nel packaging.
Beckhoff: www.beckhoff.it
Maggiori informazioni: www.beckhoff.it/TwinCAT
Contenuti correlati
-
 Un 2025 ‘fiacco’ per l’industria italiana rappresentata da Ucimu che spera in una timida ripresa nel 2026
Un 2025 ‘fiacco’ per l’industria italiana rappresentata da Ucimu che spera in una timida ripresa nel 2026Il 2025 si è rivelato un anno complessivamente fiacco per l’industria italiana costruttrice di macchine utensili, robot e automazione, rappresentata da Ucimu, che ha registrato una sostanziale stazionarietà della produzione rispetto all’anno precedente. Il risultato deludente è...
-
 Nissan e Red Hat, insieme per progettare il futuro dei veicoli software-defined
Nissan e Red Hat, insieme per progettare il futuro dei veicoli software-definedRed Hat ha annunciato una nuova iniziativa di progettazione congiunta con Nissan Motor per la realizzazione di una piattaforma software-defined vehicle (SDV) di nuova generazione. La collaborazione prevede l’adozione di Red Hat In Vehicle Operating System come base...
-
 Il mercato italiano della robotica vale 3,5 miliardi di euro: i robot innovativi superano i confini della fabbrica
Il mercato italiano della robotica vale 3,5 miliardi di euro: i robot innovativi superano i confini della fabbricaIl 28% delle aziende italiane oggi utilizza soluzioni di robotica, principalmente nella manifattura, per un mercato che secondo l’Osservatorio Innovative Robotics del Politecnico di Milano nel 2025 è pari a 2,2 miliardi di euro tenendo conto delle...
-
 OrchestrationSuite abilita il futuro dell’automazione software-defined
OrchestrationSuite abilita il futuro dell’automazione software-definedLa nuova applicazione web-based OrchestrationSuite di SEW-Eurodrive è una suite on-demand che semplifica l’automazione industriale consentendo di implementare, gestire e aggiornare il software tramite un’unica piattaforma. Combina ambienti di progettazione basati su cloud, accesso remoto sicuro e...
-
 Tagli sicuri, rapidi e ripetibili
Tagli sicuri, rapidi e ripetibiliGrazie alle soluzioni di Inovance Technology, Spiraltech ha sviluppato un’innovativa macchina da taglio automatizzata: conveniente, flessibile e compatta Leggi l’articolo
-
 Robotica oncologica senza errori
Robotica oncologica senza erroriKawasaki Robotics e Yuyama Manufacturing hanno sviluppato ChemoRo the Spike, sistema robotizzato per la preparazione automatizzata di farmaci oncologici Leggi l’articolo
-
 Hannover Messe: con coerenza verso il 2027
Hannover Messe: con coerenza verso il 2027Un messaggio chiaro da Hannover Messe 2026: le tecnologie sono pronte e i concept testati, ora è tempo di applicarli con continuità Leggi l’articolo
-
 Wibu-Systems rilascia CodeMeter 9.00 e CodeMeter Protection Suite 11.80
Wibu-Systems rilascia CodeMeter 9.00 e CodeMeter Protection Suite 11.80Con CodeMeter 9.00, Wibu-Systems avvia la trasformazione graduale verso un ambiente runtime universale, destinato a supportare sia i CmDongle attuali, sia una nuova generazione di CmDongle, costruiti per la crittografia post-quantistica. Questo sviluppo non rappresenta un punto...
-
 Méca-Précis ottimizza i processi di controllo con l´uso di celle di misura robotizzate
Méca-Précis ottimizza i processi di controllo con l´uso di celle di misura robotizzateAlcuni mestieri si tramandano di padre in figlio, assieme alla passione per l’eccellenza. Quando Bruno Mériaudeau parla della raffinatezza dei componenti prodotti nel suo laboratorio, la luce nei suoi occhi e l´entusiasmo nella sua voce, velato di orgoglio,...
-
 TrendAI entra a far parte di Project Glasswing di Anthropic
TrendAI entra a far parte di Project Glasswing di AnthropicTrendAI, business unit di Trend Micro specializzata in AI security, è entrata a far parte di Project Glasswing di Anthropic, l’iniziativa che supporta le organizzazioni nell’identificare e risolvere le vulnerabilità nei sistemi software critici. Come parte del programma,...
Scopri le novità scelte per te
-
Un 2025 ‘fiacco’ per l’industria italiana rappresentata da Ucimu che spera in una timida ripresa nel 2026
Il 2025 si è rivelato un anno complessivamente fiacco per l’industria italiana costruttrice di macchine utensili, robot...
-
Nissan e Red Hat, insieme per progettare il futuro dei veicoli software-defined
Red Hat ha annunciato una nuova iniziativa di progettazione congiunta con Nissan Motor per la realizzazione di una...





Notizie Tutti ▶
-
 IO-Link pubblica la nuova specifica machine-readable per la mappatura JSON
IO-Link pubblica la nuova specifica machine-readable per la mappatura JSONLa Community IO-Link ha annunciato il rilascio di una nuova specifica dedicata alla mappatura...
-
 Humanoid Robots Summit Europe 2026 approda a Stoccarda questo settembre
Humanoid Robots Summit Europe 2026 approda a Stoccarda questo settembreEvento di rilevanza per l’industria della robotica umanoide, l’Humanoid Robots Summit Europe 2026 sarà...
-
 Da Pomini Tenova e Siemens soluzioni avanzate di revamping delle rettificatrici
Da Pomini Tenova e Siemens soluzioni avanzate di revamping delle rettificatriciPomini Tenova, marchio del gruppo Tenova e leader globale nelle tecnologie e nei servizi...
Prodotti Tutti ▶
-
 Linea Poliscreen compatibile Belden, progettata per il mercato europeo da Lapp
Linea Poliscreen compatibile Belden, progettata per il mercato europeo da LappLAPP annuncia l’evoluzione della propria linea Poliscreen compatibile Belden. Si tratta di 29 referenze...
-
 Innodisk presenta a Computex 2026 con un ecosistema integrato per l’intelligenza artificiale edge a 5 livelli
Innodisk presenta a Computex 2026 con un ecosistema integrato per l’intelligenza artificiale edge a 5 livelliInnodisk presenterà il suo ecosistema completo per l’AI edge alla fiera Computex 2026, dimostrando come...
-
 Advantech presenta le sue nuove soluzioni basate su Qualcomm Dragonwing IQ-9 per l’intelligenza visiva di livello industriale
Advantech presenta le sue nuove soluzioni basate su Qualcomm Dragonwing IQ-9 per l’intelligenza visiva di livello industrialeAdvantech è orgogliosa di presentare le ultime soluzioni di edge AI basate sul processore...

{kind=link}